



Manuálne žehlenie
Jednou z operácií na montážnej linke sedadiel je parné žehlenie. Vďaka pare sa molitan naduje a vyplní diery a medzery pod poťahom, čím sa látka sedačky lepšie prichytí na molitan. Donedávna žehlenie vykonával jeden pracovník ručnou parnou žehličkou, podobnou, aká sa používa aj v komerčných rýchločistiarňach. Žehlil bočné a predné časti sedáka a operadla. Išlo o nekvalifikovanú a stereotypnú manuálnu, ľudskú prácu, ktorú sa v závode rozhodli nahradiť robotickou, a pracovníka presunúť na iné úlohy. Druhým hlavným dôvodom nasadenia robota bolo zabezpečenie stability kvality žehlenia ako procesu.
Menší, ale šikovný
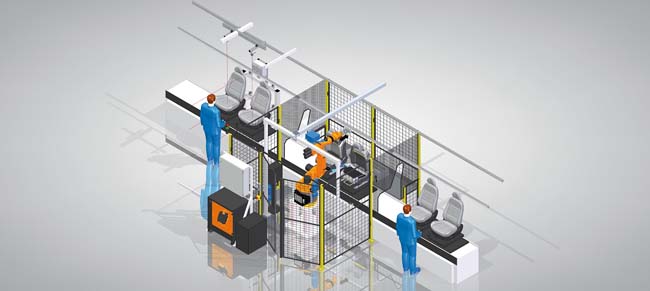
V porovnaní s prvou aplikáciou, kde sa manipuluje s výrazne ťažšími sedadlami, stačilo tentoraz použiť oveľa menší robot, konkrétne štandardný model KUKA KR16 s maximálnou nosnosťou 16 kg na šiestej osi. Ten je plne integrovaný do linky vrátane bezpečnostných prvkov, ako sú svetelné závory, skenery vnútri robotickej bunky a ochranné oplotenie s dverným zámkom. Pred pracoviskom je detekcia, či je sedačka vo vyhovujúcej pozícii, aby sa nestalo, že sedačka príde do bunky nesprávne naklonená. Detekciu zabezpečujú optické snímače na vhodne zvolených miestach. Pracovníkom na linke sa na operátorskom paneli zároveň zobrazuje umiestnenie sedačky s prípadným naznačením korekcie polohy. Ak sedačka nemá správnu polohu tesne pred príchodom na stanovisko, detekcia optickými snímačmi ju z procesu žehlenia vylúči a sedačka následne prechádza robotickým pracoviskom bez zastavenia. V rámci núdzovej stratégie je za robotickou bunkou nainštalovaná manuálna žehlička, ktorá sa využíva práve v prípadoch, keď je sedačka nesprávne polohovaná a tiež v prípade výskytu časového sklzu na linke či poruchy robota.
Základný návrh pracoviska a dráh pohybu robota
Prvotný návrh usporiadania robotického pracoviska vyhotovili technici Blumenbeckera v systéme PLM od spoločnosti Siemens. V ňom sa vizualizovala ergonómia pracoviska a tiež možné kolízne stavy. Simulácia samotných dráh robota nebola v tomto prípade potrebná, pretože išlo o relatívne jednoduché trajektórie, ktoré sa navrhovali na reálnom robotickom modeli a ladili sa priamo na mieste inštalácie. Robotická bunka je pod taktovkou vlastného riadiaceho systému robota, ktorý komunikuje po zbernici Profibus s nadriadeným systémom riadenia celej linky.
Robotické žehlenie
Sedačka po príchode do robotickej bunky zastavuje v presne vymedzenej polohe a zozadu sa zaisťuje proti pohybu. Presná pozícia je dôležitá, pretože dráhy robota sú počas žehlenia presne zadefinované a robot ich počas svojej činnosti adaptívne nemení na základe aktuálnej spätnej väzby. Trajektórie pohybu robota sú v súlade so žehliacim plánom, ktorý zadefinovalo oddelenie kvality. Dráhy sú zároveň flexibilné a dajú sa upraviť podľa požiadaviek závodu. Jednoduché modifikácie trajektórií si vďaka zaškoleniu od zástupcov robotického integrátora dokáže obsluha zrealizovať sama. Popri tom je schopná odstraňovať aj jednoduché poruchy, resp. problémy na robotickej bunke. „Naším cieľom nie je nechať zákazníkov v nevedomosti. Práve naopak, snažíme sa im všetko povysvetľovať, zaškoliť ich a zaangažovať v maximálnej možnej miere,“ hovorí Ing. Peter Grňo, konateľ Blumenbecker Slovakia, s. r. o. Maximálny čas vyhradený na žehlenie závisí od taktu linky, ktorý je 55 sekúnd, a počas neho sa musia stihnúť vyžehliť obe predné sedadlá.
Najväčšie výzvy projektu
Jednou z najzložitejších úloh bolo zakomponovanie manuálnej žehličky do robota, čo technici Blumenbeckeru intenzívne konzultovali s dodávateľom žehliacej technológie v závode. Potrebné bolo tiež vyriešiť, ako sa má robot správať pri stlačení tlačidla núdzového zastavenia. Dôležité bolo zabezpečiť, aby horúca žehlička nezostala stáť tesne nad poťahom a nepoškodila ho. To sa docielilo tým, že robot žehličku od sedačky oddiali. Žehlička je na koncovom efektore upevnená na pružnom valci s rozsahom pohybu približne do 5 cm a pri žehlení sa dotýka povrchu poťahu. Bolo potrebné zaoberať sa aj tým, že počas nutnej odstávky, napr. z dôvodu prestávky na obed, sa v hadiciach vedúcich k žehličke hromadí voda z kondenzovanej pary. Tá sa musí pred opätovným spustením žehlenia odstrániť, čo sa docieli prefúknutím stlačeným vzduchom. V prvotnom návrhu boli na vstupe robotickej bunky bezpečnostné optické závory. Pri používaní žehličky sa však stávalo, že sa para dostala do smeru optických lúčov, čo spôsobovalo falošné signály o narušení pracovného priestoru. Optické závory sa preto nahradili mechanickými zábranami.
Blízka budúcnosť je robotická
V závode prebieha nepretržitá trojzmenná prevádzka (okrem nedele) a nasadením robota sa pri súčasnom nedostatku ľudí na trhu práce podarilo presunúť troch pracovníkov na akútnejšie úlohy. Návratnosť investície do nového riešenia pritom nepresiahne dva roky. V najbližšom období sa toto robotické pracovisko bude rozširovať o ďalší robot, ktorý bude sedačky žehliť aj zo zadnej strany. Túto činnosť momentálne vykonáva manuálne jeden pracovník. Po nedávnej úplne prvej robotickej inštalácii v závode kompetentní manažéri veľmi rýchlo rozpoznali veľký potenciál robotizácie a v strednodobom horizonte sa zamýšľajú nad nasadením robota aj na skrutkovanie.
