





Priemyselné roboty expandujú od automobilového do potravinárskeho, farmaceutického a chemického priemyslu, ďalej do logistiky a recyklačných procesov. Sú nasadzované aj ako náhrady za „jednoúčelové“ prípravky, kde sa vyžaduje už vyššia pružnosť pracovísk; vypĺňajú tak medzery ručných činností pri automatických linkách a s 3D vizuálnymi systémami nachádzajú veľké možnosti uplatnenia pri paletizácii prichádzajúcich, napr. z linky alebo lisu, neusporiadaných objektov manipulácie a pri triedení. Široké aplikačné možnosti robotov vyžadujú zvládnutie ich konštrukčného riešenia na báze modulárneho princípu umožňujúceho stavbu rôznych kinematických konfigurácií tak robotov, ako aj efektorov a pružného inteligentného riadenia.
Preč sú už časy, keď bol robot vhodný len na opakujúce sa manipulačné činnosti. Dnešná škála robotov zahŕňa nanoroboty schopné manipulácie s molekulami, veľké roboty s nosnosťou viac ako 1 000 kg a roboty pre takmer každé výrobné a nevýrobné odvetvie, ale aj do rádioaktívneho prostredia, mora, vesmíru, pričom je čoraz menej oblastí bez využitia robotov. Doteraz sme hľadali nové oblasti na používanie robotov, dnes je otázka je ešte oblasť, kde by sa robot nedal použiť
Vývoj robotiky vo svete
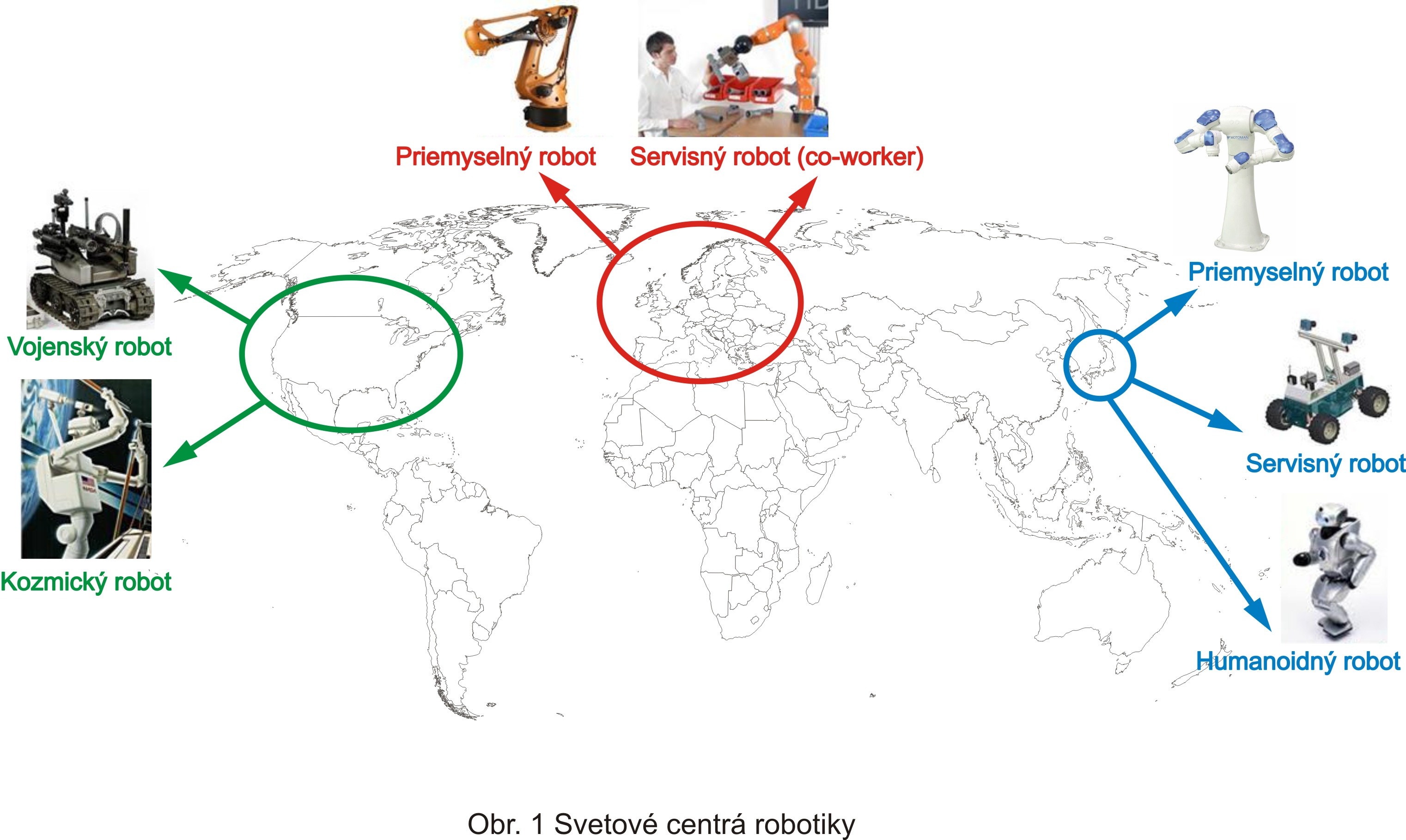
V popredí svetového vývoja robotiky sú Japonsko, USA, Európa a Južná Kórea (obr. 1). USA dominujú v servisnej robotike na vojenské účely mobilnými robotmi typu off-road. Sú jedineční v robotoch pre vesmír a vo vývoji interplanetárnych robotov. Zaujímavosťou je, že USA nedominuje v priemyselnej robotike, a to aj napriek tomu, že prvé roboty boli vyrábané v USA (General Motors, Cincinnati Milacron, Westinghouse a General Electric). K známym výrobcom priemyselných robotov v USA dnes patria len Adept a San Jose-based Company.
V Japonsku a v Južnej Kórei sú široko rozvinuté aktivity výskumu a výroby servisnej robotiky, do ktorej kategórie patria aj humanoidné roboty. Sú to predovšetkým roboty určené pre domácnosť, na zábavu či záchranu. Ukazuje sa, že to bude v najbližších 10 rokoch jeden z najobchodovanejších tovarov. Japonsko a Južná Kórea vidia ďalší veľký potenciál vo vývoji robotov pre starostlivosť o starších ľudí. Japonsko je už tradične silné v priemyselnej robotike. V Európe dominujú priemyselné roboty a v rámci servisnej robotiky prevláda orientácia na mobilnú robotiku, a to transport a logistiku hlavne vo vonkajšom prostredí (in urban environment).
Druhou oblasťou sú roboty na spoluprácu s človekom. Európa je lídrom vo výrobe a nasadzovaní priemyselných robotov (s 33 % zastúpením). V Európe je okolo 15 významných firiem vyrábajúcich priemyselné roboty (KUKA, ABB, REIS, SCHUNK, STAUBLI, PROMOT,COMAU, CLOOS, FATRONIC). V týchto dominantných oblastiach je niekoľko národných a medzinárodných programov na výskum robotiky. USA prijalo v roku 2009 dokument Robotics and Automation Research Priorites for U.S. Manufacturing, v ktorom zdôrazňuje, že robotika je kľúčom k transformácii výroby na dosiahnutie vysokej konkurencieschopnosti. V Japonsku majú veľké firmy vlastné programy rozvoja nových riešení a aplikácie robotov.
Tiež v Európe je čoraz viac výskumných programov orientovaných na robotiku. Rok 2010 je označovaný ako silný návrat k priemyselnej robotike. Vyplýva to z toho, že v roku 2009 poklesla ročná inštalácia robotov na 60 000, v roku 2010 to už bolo 118 000 a v roku 2011 okolo 130 000. Vzostupný trend sa predpokladá aj v nasledujúcich piatich rokoch a v roku 2017 by mal ročný počet inštalovaných robotov presiahnuť hodnotu 200 000. Tento trend sa opiera najmä o dynamický rast trhu a nasadzovanie robotov najmä v Číne, Južnej Kórei a štátoch ASEAN.
Nové oblasti vývoja a aplikácie priemyselných robotov
Rozvoj priemyselnej robotiky upúšťa od ich individuálneho a „izolovaného“ nasadzovania a prechádza k skupinovému nasadzovaniu a budovaniu pracoviska typu robot – človek. Zmeny prístupu k rozvoju dnešnej priemyselnej robotiky uvádza tab. 1.
| Doteraz | Teraz |
| stabilný priemyselný robot | mobilná realokácia |
| periodické, resp. opakované cykly s malými zmenami | často menené úlohy, zriedka cyklicky opakovateľné |
| individuálna činnosť robotov | kooperácia robotov |
| on-line/off-line programovanie | on-line zadávanie úloh |
| žiadna spolupráca robot-človek v zóne robota | vzájomná spolupráca človek-roboty pri riešení spoločných úloh |
| efektivity pri stredných a vyšších sériách | vyššia efektivita pri nižších sériách |
Tab. 1 Zmena prístupu k rozvoju dnešnej priemyselnej robotiky
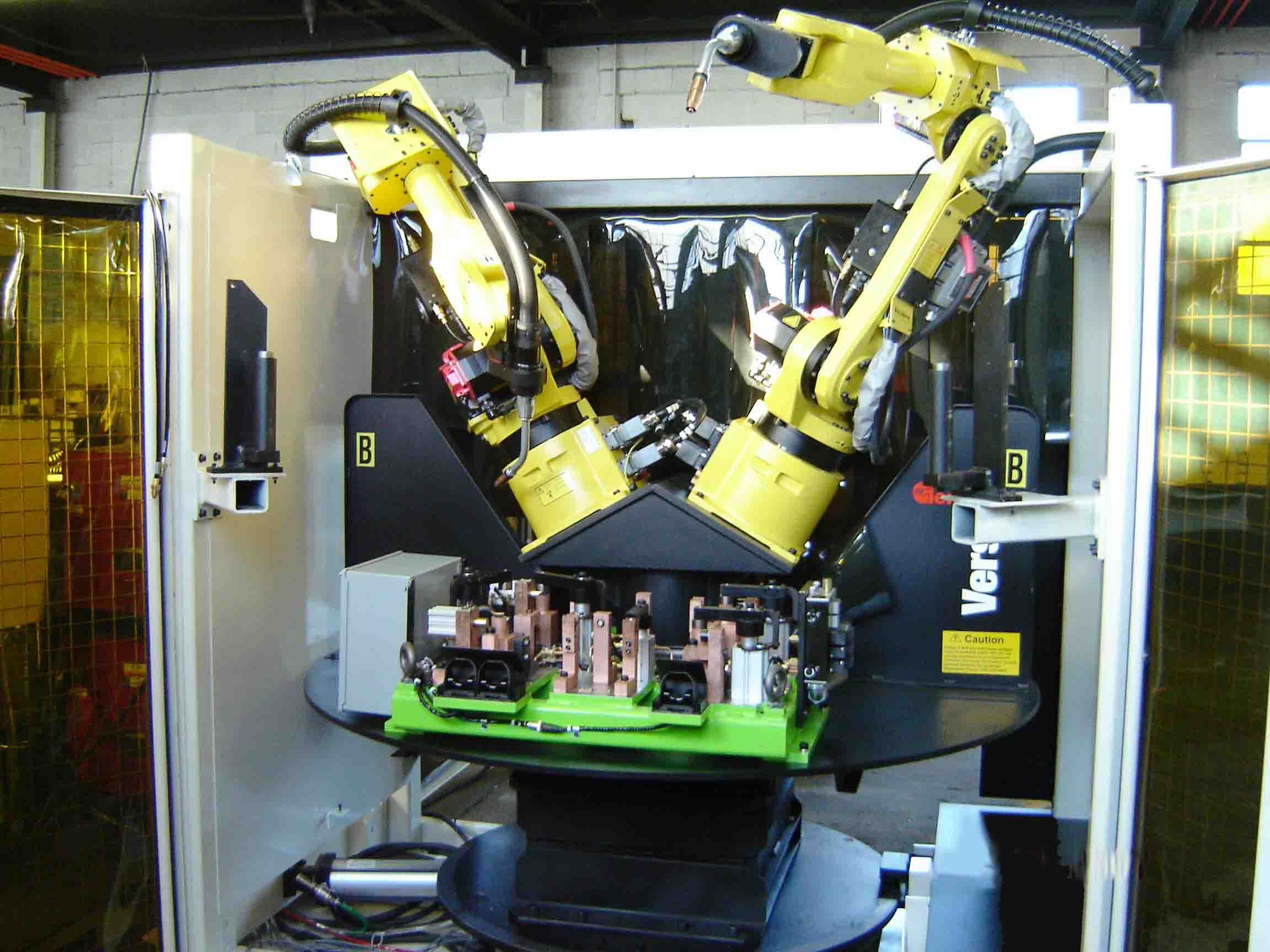
Ukázalo sa, že dosiaľ preferovaný smer nasadzovania robotov typu jeden robot – jedna činnosť je už neefektívny. Avšak na pracovisku je mnoho ďalších činností označovaných ako pomocné, ktoré napr. presne polohujú objekt manipulácie na odobratie robotom, a mnoho ďalších, pre ktoré boli navrhnuté ako jednoúčelové zariadenia. Pri súčasnej inovačnej dobre, už takéto pracoviská nevyhovujú. Riešením sú roboty s automatickou výmenou efektorov, resp. technologických hlavíc, rekonfigurovateľné chápadlá, využívanie viacerých robotov ako jednej skupiny so spoločným cieľom a robotov s viacerými ramenami a zvyšovanie autonómnosti robotov v čím ďalej, tým viac neštruktúrovanom prostredí. K typickým aplikáciám multirobotických systémov patria zváracie bunky, v ktorých jeden alebo viac robotov vykonáva zváranie a polohovanie a manipuláciu so zvárkami vykonáva iný robot (obr. 2).
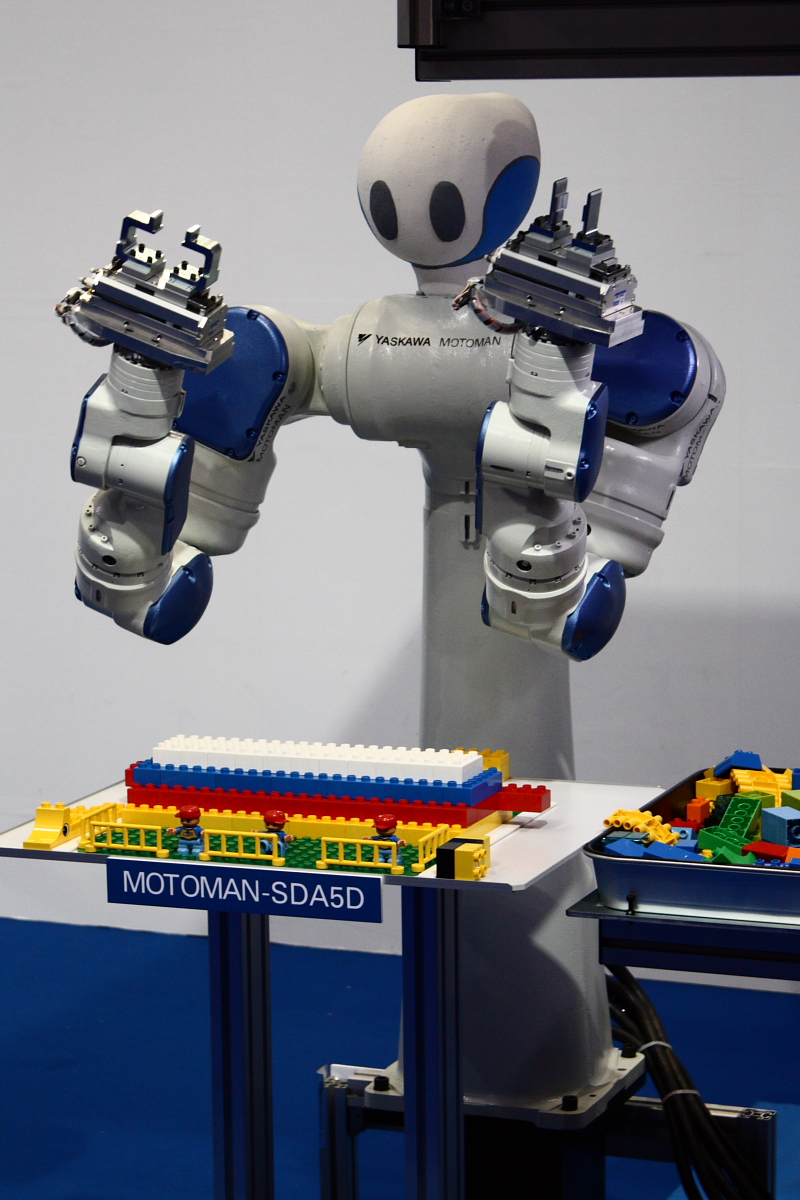
Prínos je zrejmý. K výhodám takýchto pracovísk patrí, že dokážu vykonávať viac druhov rôznych činností. Od duo robotov (obr. 3) možno v najbližšej budúcnosti očakávať, že prekonajú aj ľudskú zručnosť, a to aj v citlivosti, nielen v sile, rýchlosti a presnosti. Základnou myšlienkou vývoja duo robotov sú činnosti človeka vykonávané obidvoma rukami pri každodennej manipulácii a pri spolupráci s viacerými pracovníkmi. Novými úlohami v multirobotických systémoch a pri duo robotoch sú stanovenie postupu činnosti a manipulačných dráh robotov a synchronizácia ich pohybu a rýchlosti. Kľúčovými aspektmi multirobotických systémov sa stáva zvládnutie paralelného riadenia a synchronizácia a kooperácia ich činnosti.
Priemyselné mobilné roboty
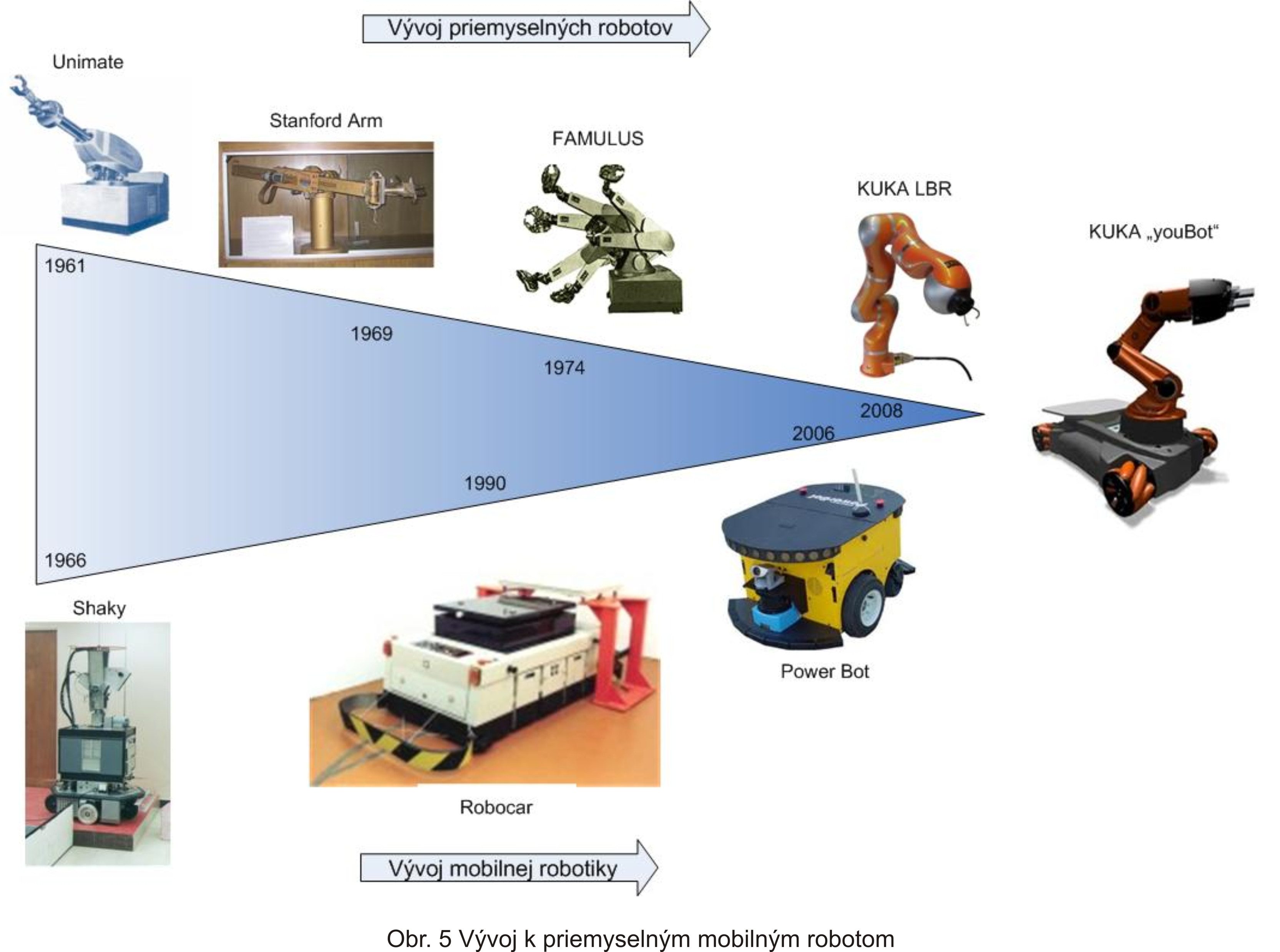
Priemyselné roboty na mobilnej platforme (obr. 4), tiež označované ako priemyselné mobilné roboty (IMR – Industrial Mobile Robot) sa predstavujú ako nová kategória robotov. Integrácia priemyselného robota a mobilného podvozku ako fundamentálnej časti servisného robota je logickým vyústením ich vývoja (obr. 5). Klasický priemyselný robot nadobúda novú technickú charakteristiku, a to mobilitu. Prejav synergických efektov z takejto integrácie umožňuje naďalej zvyšovať stupeň automatizácie výroby. Uplatnenie IMR je najmä v logistickom reťazci vo výrobných, ale aj v nevýrobných prevádzkach. IMR pri vybavení robota montážnymi a servisnými efektormi a nástrojmi sa skôr zaraďujú do kategórie servisných robotov. Integrácia priemyselné robota a mobilného podvozku prináša ďalšie rozšírenie možnosti využívania priemyselných robotov.
Robot Co-worker
Logickým vyústením ďalšieho vývoja, resp. aplikácie priemyselných robotov budú systémy robot Co-worker – človek na báze vysokej symbiózy (obr. 6). Od týchto robotov sa očakáva, že budú nielen vedieť pomáhať človeku pri rôznych činnostiach, ale že s ním dokážu v prirodzenom jazyku komunikovať, že budú vysoko autonómne a inteligentné a, samozrejme, bezpečné. Kým doteraz mali dominantnú úlohu pri návrhu priemyselných robotov dizajnéri a konštruktéri, pričom ich úlohou bolo čo najlepšie robot začleniť do výrobného procesu, teraz táto úloha prechádza na zvyšovanie inteligentného „ľudského“ správania sa robotov. Zvlášť dôležitú úlohu tu nadobúdajú psychológovia.
Doterajší prístup vychádzal z podmienky dosiahnutia vhodnej integrácie s ostatnými strojnými zariadeniami. Z pohľadu postavenia človeka bolo dôležité navrhnúť vhodné rozhranie na programovanie robota a zohľadniť ergonomické aspekty pri jeho údržbe. Robot Co-worker je vybavovaný 3D systémami na snímanie prostredia, a to aj mimo vlastnej pracovnej zóny, hlavne so zohľadnením pohybov človeka a jeho bezpečnej identifikácie. Jednou z oblastí výskumu spoločného pracoviska robot – človek sú metódy hľadania optimálneho rozdelenia úloh medzi robota a človeka.
Rameno robota a ľudské ruky spolu manipulujú s jedným objektom, resp. spolu sa podieľajú na tej istej technologickej operácii. Takéto robotické ramená sú veľmi citlivé a robot vie reagovať na ľudské príkazy. Predpokladá sa, že tento typ robotov bude mať veľké využitie, a to nielen v priemyselných aplikáciách, ale stane sa naším asistentom, pomocníkom pri mnohých činnostiach. Ďalej sa predpokladá jeho široké uplatnenie v zdravotníctve pri rehabilitácii, ošetrovaní a pomoci imobilným ľuďom.
Záver
Základnou požiadavkou na vývoj priemyselných robotov sa stáva zdokonalenie ich konštrukcie, aby sa dosiahla vyššia mobilita a manévrovateľnosť a aby sa zvýšil stupeň ich inteligencie s cieľom zvýšenia ich autonómnosti. Hlavným trendom v konštrukcii priemyselných robotov je riešenie inteligentného mechatronického pohonného modulu s priamou integráciou v kĺbe robota. Kľúčovými technológiami priemyselných robotov je používanie nových materiálových komponentov, ktoré sú pevnejšie a ľahšie a ktorými sa dosahuje zdokonalenie dizajnu, lepšie dynamické vlastnosti pri vyššej nosnosti a zlepšenie aktuátorov a ramien vybavených rôznymi senzormi citlivosti a videnia so samonavádzaním do požadovaných pozícií.
Príspevok je riešením projektu VEGA č. 1081011.
prof. Ing. Mikuláš Hajduk, PhD.
Ing. Rudolf Jánoš, PhD.
Ing. Marek Sukop, PhD.
Ing. Peter Tuleja, PhD.
Ing. Jozef Varga
TUKE, Strojnícka fakulta,
Katedra výrobnej techniky a robotiky