

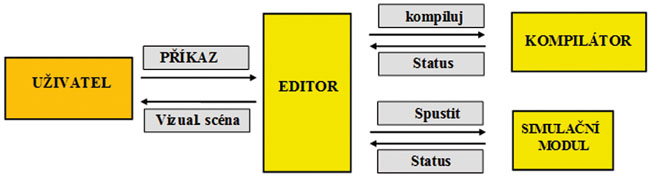
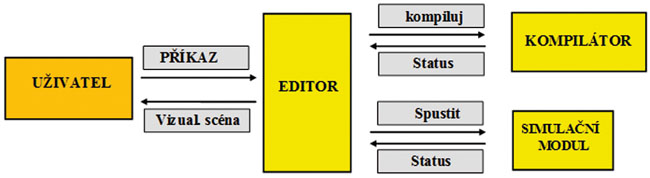
Obr. Komunikace mezi moduly
Úvod
Průmysloví technologové vyžadují často od výzkumníků v oblasti řídicí techniky materiály, které by jim umožnily pochopit chování řízených reálných technologických procesů a usnadnily jim tak nastavení použitého řídicího systému toho kterého procesu, což je mnohdy velmi obtížné zejména pro technology bez zkušeností. V průmyslu jsou stále ještě nejpoužívanějšími techniky PID řízení, SMC u systémů s více stupni volnosti, ON-OFF řízení, PLC či fuzzy logické řízení popř. jeho modifikace jako neurofuzzy techniky apod.
S uvážením výše uvedeného jsme vytvořili variabilní multifunkční simulační softwarový nástroj umožňující sestavovat modely složitých technologických procesů s vizualizací jejich chování, který bude možno propojit s reálnými řídicími prostředky různých shora uvedených typů. Počítač je vybaven dvěma kartami AXIOM, které zajišťují prostřednictvím binárních a analogových I/O kanálů komunikaci simulátoru s vnějším prostředím. V tomto příspěvku je zaměřena pozornost na model soustavy balicí linky sestávající ze dvou pásových dopravníků, na nichž je prostřednictvím připojeného fuzzy regulátoru C200H –FZ 001 firmy OMRON realizováno řízení rychlosti jednoho dopravníku za účelem synchronizace výskytu výrobku na jednom dopravníku a obalu na dopravníku druhém. Pohyb obou dopravníků a výskytu předmětů a obalů na nich je vizualizován. To samozřejmě umožňuje odhalit nedostatky v dynamice celé linky i možné kolizní situace, které je třeba ošetřit.
Vytvořený nástroj se osvědčil i za účelem výuky studentů ČVUT. Je využíván v předmětu řízení technologických procesů na Katedře řídicí techniky FEL ČVUT, kde studenti s jeho využitím naprogramují fuzzy logickou jednotku a poté se stejným nastavením řídí fuzzy jednotkou reálný laboratorní model balicí linky se dvěma pásovými dopravníky.
Simulátor technologických procesů
Bylo třeba vyvinout univerzální simulační nástroj ve smyslu možnosti sestavovat k simulaci různorodé technologické procesy i užití všech možných řídicích systémů, použitých pro jejich řízení. Dále by měl simulační nástroj navržen jako modulární, aby bylo možno jednotlivé moduly upravovat popř. rozšiřovat dle nároků uživatelů bez nutného zásahu do modulů zbývajících. V neposlední řadě by ze zjevných důvodů měl být uživatelsky přátelský. S cílem vyhovět všem těmto požadavkům jsme se rozhodli pro vytvoření simulačního systému s vestavěným editorem, kompilátorem a simulačními moduly umožňují sestavování široké třídy technologických scén.
Blokový diagram ilustrující komunikaci mezi jednotlivými moduly je znázorněna na obr. 1.
S cílem zajistit možnost sledování chování simulovaného procesu při daném nastavení použitého řídicího systému byl zvolena vizualizace v reálném čase. Uživatel sestaví danou simulovanou technologickou scénu v modulu EDITOR. Ten obsahuje knihovnu různých objektů. Knihovna může být dle požadavků uživatele snadno rozšiřována. Objekty v ní obsažené můžeme rozdělit do 6 kategorií:
- vstupní objekty (generátory analogových a binárních signálů…)
- pohony (motory)
- aktuátory (pásové dopravníky, roboty, počáteční a koncové body přepravovaných předmětů apod.)
- snímače (inkrementální snímače, fotoelektrické snímače, Hallovy sondy, kapacitní snímače, termočlánky tachogenerátory, tachodynama apod.)
- výstupní objekty (stupnice, displeje, apod.)
- spojení (el. vodiče, potrubí apod.)
Editor je vybaven s vestavěnou kontrolou, která testuje, zda jsou všechny objekty vytvořené technologické scény správně umístěny a nepřekrývají se navzájem. Poté, co je obdržen příkaz ke kompilaci, provede kompilátor syntaktický test vytvořené scény a vytvoří spojení mezi jednotlivými objekty. Je-li kompilační proces úspěšný, vygeneruje kompilátor hlášení o úspěšné kompilaci a předá řízení zpět editoru, který spustí simulaci v reálném čase. V případě, že je kompilace přerušena, převezme editor kód chyby a vygeneruje chybové hlášení. Simulační modul je tvořen simulačním cyklem, který testuje stav všech objektů scény s periodou 50 ms. Simulační proces může být přerušen buď uživatelem (stisknutím klávesy) nebo chybou, jejíž kód je bezprostředně zobrazen v chybovém hlášení.
Počítač je vybaven dvěma kartami AXIOM, které zajišťují prostřednictvím binárních a analogových I/O kanálů komunikaci simulátoru s externími regulátory. Konkrétně rozhraním AX 5212 (8 výstupních analogových kanálů) a rozhraním AX 5411 (16 vstupních analogových kanálů).
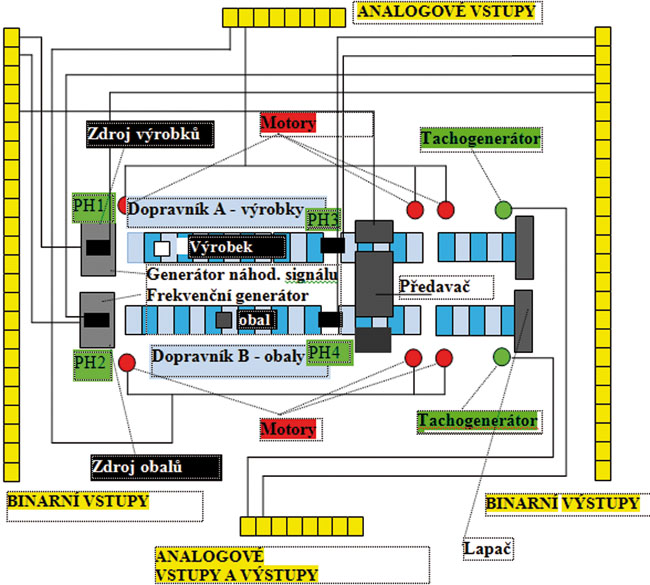
Popis simulovaného technologického procesu
Na pásový dopravník A jsou v náhodných intervalech prostřednictvím „generátoru výrobků“ pokládány výrobky určené k zabalení. Na dopravník B jsou „generátorem obalů“ dodávány v pravidelných intervalech obaly na tyto výrobky. Dopravník s výrobky se pohybuje konstantní rychlostí, rychlost dopravníku s obaly je možno plynule regulovat. Předpokládáme, že se na celé balicí lince může vždy nacházet jen jedna dvojice výrobek-obal. K zabalení výrobku dojde v tzv. předavači. Zabalený výrobek poté pokračuje po dopravníku B do lapače zabalených výrobků. Pásy dopravníků jsou poháněny motory. Řízením jejich otáček je možno měnit rychlost pohybu dopravníků. Výrobky jsou generovány generátorem výrobků v náhodných intervalech v rozmezí 15 až 25 s. Ten je ovládán generátorem náhodného signálu, který zajišťuje aktivaci generování výrobku v předepsaném intervalu. Vstupem náhodného generátoru je signál uvolnění generování obdobným způsobem je zajištěno i generování obalů. Ke zdroji obalů je ovšem připojen frekvenční generátor, který aktivuje generování ve zdroji s konstantní periodou 20 s. výstupy generátorů jsou prostřednictvím snímačů PH1 a PH2 připojeny k výstupům z technologie.
V libovolném okamžiku tak máme možnost získat aktuální informaci o stavu generování výrobku či obalu. V prostoru před předavačem jsou na dopravnících umístěny senzory PH3 resp. PH4, které detekují průjezd výrobku resp. obalu. Cílem řízení balicí linky je dosáhnou plynulou regulací rychlosti dopravníku s obaly současného příjezdu obalu a výrobku do prostoru snímačů PH3 a PH4 tak, aby bylo možné okamžitě spustit program předavače. Linka se takto výrazně zefektivní, neboť odpadne nutnost zastavování jednoho z dopravníků při čekání na obal/výrobek, který nedorazil včas do prostoru před předavač. Výrazně se také prodlouží životnost dopravníků a sníží se energetická náročnost celé linky. Výpočet změny rychlosti dopravníku s obaly provádí fuzzy logika jednotky C200H- FZ001 OMRON. Princip činnosti fuzzy regulátorů je detailně popsán v [1] a [2].
Návrh a realizace řízení technologického procesu
Řízení linky je zajišťováno dvěma nezávislými procesy. Hlavní řídicí program vykonávaný programovatelným automatem C200H OMRON zajišťuje základní komunikaci řízení s technologií. Provádí sběr dat ze vstupních jednotek (signály z čidel PH1 – PH4 tj. okamžité rychlosti dopravníků) a uskutečňuje prostřednictvím výstupních jednotek PLC akční zásahy do technologie (korekce rychlosti dopravníku obalů, spouštění a zastavování obou dopravníků, spouštění předavače a uvolňování generátorů). Hlavní program rovněž ošetřuje mimořádné stavy technologie (spouštění linky, synchronizace výrobek-obal v případě chybné regulace, přetečení nebo podtečení výstupní rychlosti dopravníku obalů). Současně připravuje data pro fuzzy jednotku FZ001, která na jejich základě počítá změnu rychlosti dopravníku s obaly. Vstupním údajem pro fuzzy regulátor je rozdíl rychlostí dopravníků DE v čase aktivací výstupů čidel PH1 a PH2 (rychlost dopravníku s výrobky je odečítána v okamžiku vygenerování výrobku, tedy při aktivaci PH1; rychlost dopravníku s obaly je odečítána v okamžiku vygenerování obalu, tedy při aktivaci PH2). Druhým vstupním údajem fuzzy regulátoru je vzdálenost E mezi výrobkem a obalem. Vzdálenost je počítána hlavním řídicím programem jako součin časového intervalu, který uplynul mezi signály z čidel PH1 a PH2 (časový rozdíl generování výrobku a obalu) a rychlosti dopravníku, na němž byl výrobek nebo obal vygenerován jako první).
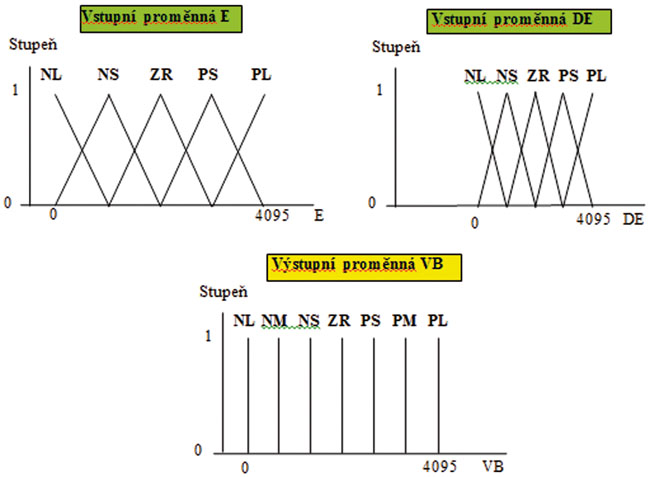
Fuzzy řídicí algoritmus musí být navržen tak, aby byl realizovatelný pomocí fuzzy jednotky FZ001 OMRON. Vlastní návrh fuzzy regulátoru spočívá ve vhodné volbě báze znalostí tj. fuzzy množin a jejich funkcí příslušnosti pro vstupní i výstupní proměnné, návrhu báze pravidel a volby vodné metody defuzzifikace. Jak již bylo řečeno, vstupem do fuzzy regulátoru technologie balicí linky je vzdálenost výrobek-obal (E) a rozdíl rychlosti dopravníků A a B (DE). Pro obě vstupní proměnné bylo zvoleno 5 fuzzy množin:
| Vzdálenost výrobek-obal E | Rozdíl rychlosti dopravníků DE |
| NL Vzdálenost záporná velká | NL Rozdíl záporný velký |
| NS Vzdálenost záporná malá | NS Rozdíl záporný malý |
| ZR Vzdálenost nulová | ZR Rozdíl nulový |
| PS Vzdálenost kladná malá | PS Rozdíl kladný malý |
| PL Vzdálenost kladná velká | PL Rozdíl kladný velký |
Záporná vzdálenost představuje situaci, kdy se nachází obal na dopravníku před výrobkem, záporný rozdíl rychlostí dopravníků nastává v případě, kdy dopravník s obaly rychlejší než dopravník s výrobky. Experimentálně bylo zjištěno, že funkce příslušnosti fuzzy množin vstupní proměnné E musí pokrýt všechny hodnoty, kterých může vzdálenost nabývat. Zvolené funkce příslušnosti pro vstupní proměnné E a DE jsou znázorněny na obr. 3.
Výstupní proměnnou navrhovaného fuzzy regulátoru je změna rychlosti dopravníku s obaly VB. Aby bylo dosaženo co nejvěrohodnějšího popisu ideálního empirického regulátoru při návrhu báze pravidel, byl zvolen počet fuzzy množin výstupní proměnné VB roven sedmi, což představuje maximum, které jednotka FZ001 OMRON podporuje. Jedná se o tyto množiny:
Změna rychlosti VB
- NL Záporná velká
- NM Záporná střední
- NS Záporná malá
- ZR Nulová
- PS Kladná malá
- PM Kladná střední
- PL Kladná velká
Funkce příslušnosti fuzzy množin výstupní proměnné jsou v jednotce FZ001 OMRON aproximovány vertikálními čarami, tzv. singletony a jsou znázorněny na obr. 3. Singletony jsou rovnoměrně rozmístěné v celém definičním oboru výstupní proměnné, aby bylo dosaženo maximální plynulosti regulace.
Báze pravidel byla stanovena experimentálně na základě empirického odhadu činnosti regulátoru technologie balicí linky. Výsledná báze pravidel ve formálním tvaru s využitím fuzzy množin definovaných pro dvě vstupní proměnné E a DE a jednu výstupní proměnnou VB je uvedena v tab. 1.
|
DE/E |
NL | NS | ZR | PS | PL |
| NL | NL | NM | NS | PS | PM |
| NS | NL | NM | NS | PS | PL |
| ZR | NL | NS | ZR | PS | PL |
| PS | NM | NS | PS | PM | PL |
| PL | NM | NS | PM | PM | PL |
Tab. 1 Báze pravidel
Tato báze pravidel byla zadána pomocí Fuzzy Support Software do fuzzy jednotky FZ001 OMRON. Báze pravidel není úhlopříčkově symetrická, což může vést k nestabilitě regulace. Nastane-li např. situace, kdy bude výrobek detekován několikrát po sobě hodně vepředu před obalem, dopravník B bude neustále zrychlovat. Taková nestabilita je ošetřena hlavním programem PLC. Dosáhne-li rychlost dopravníku s obaly určité hodnoty, nelze ji již nadále zvětšovat resp. zmenšovat.
Aby bylo dosaženo co nejpřesnějšího řízení dopravníku s obaly byla zvolena pro defuzzifikaci známá metoda těžiště. Metody výběru maxima zleva nebo zprava dávají v tomto konkrétním případě velmi špatné výsledky.
Uvedeným postupem se podařilo navrhnout a realizovat řízení simulované technologie balicí linky s využitím PLC C200H OMRON a fuzzy jednotky FZ001 OMRON. Řízení splnilo svůj hlavní cíl tedy minimalizovat dobu synchronizace výskytu předmětů a obalů na pásových dopravnících balicí linky v prostoru čidel PH3 a PH4. Jistým omezujícím faktorem při použití fuzzy jednotky FZ001 OMRON je aproximace funkcí příslušnosti výstupní fuzzy proměnné singletony. Tato aproximace vnáší do řízení poměrně velkou nepřesnost, neboť se u realizované technologie uplatňuje v jednom časovém okamžiku příliš málo pravidel. Tento závěr je v určitém rozporu s tvrzením výrobce, že aproximace funkcí příslušnosti singletony je vždy zcela postačující. I u tohoto jednoduchého příkladu se potvrdil známý fakt, že pro dokonalou funkci fuzzy řízení je zapotřebí mnoho experimentů a poměrně velké množství úprav báze znalostí.
Poděkování
Tato práce byla podpořena projektem MŠMT INGO LG14005.
Literatura
[1] HYNIOVÁ,Kateřina – STŘÍBRSKÝ,Antonín: Instrumentation of processes, FEE CTU. Prague, pp. 160-189,2014, 1994
[2] OMRON C200H – operation manual, OMRON 1992.
[3] OMRON C200H –FZ001Fuzzy logic unit-Operation manual, OMRON, 1992.
[4] OMRON Programming tool for OMRON PLC, OMRON, 1996.
[5] OMRON Fuzzy Support Software-Operation manual, OMRON, 1992.
[6] ZADEH, Lotfi Aliasker: Outline of a New Approach to The Analysis of Complex Systems and Decision Processes, Trans. Syst,. Man, Cyber. Vol-SMC-3,no.1, pp.28-44.
Kateřina Hyniová
Katedra číslicového návrhu
Fakulta informačních technologií
České vysoké učení technické v Praze
hyniova@fit.cvut.cz
