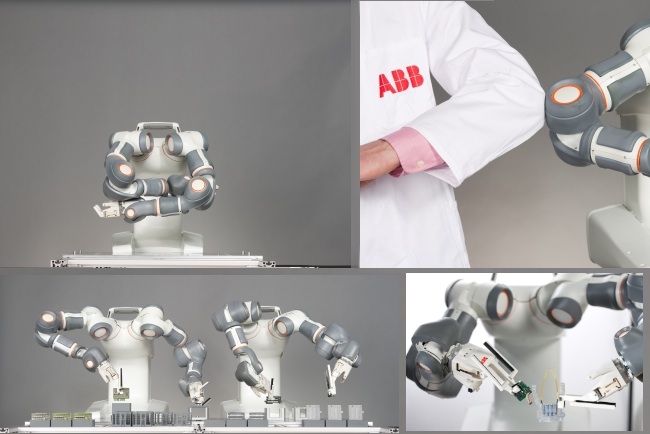
Koncepcia dvojramenného robota
Aby sa splnili požiadavky veľmi rýchlych výrobných procesov, ktoré možno nájsť napríklad pri výrobe spotrebnej elektroniky a čoraz častejšie aj v iných oblastiach priemyslu, vyvinula spoločnosť ABB koncepciu dvojramenného robota, ktorý dostal pracovné označenie Frida. Skladá sa z flexibilných uchopovacích čeľustí, kamerového systému na lokalizáciu súčiastok a kompletnej funkcionality dobre známej z najmodernejšieho regulátora robotov IRC5. Robot je navyše kompaktný a určený na umiestnenie do priestorov, ktoré sú ergonomicky upravené na prácu ľudí. To v prípade zmeny pracovných postupov alebo výroby novej série produktov umožňuje vzájomnú výmenu robota za človeka – pracovníka.