Návrh a optimalizácia robotizovanej výrobnej linky
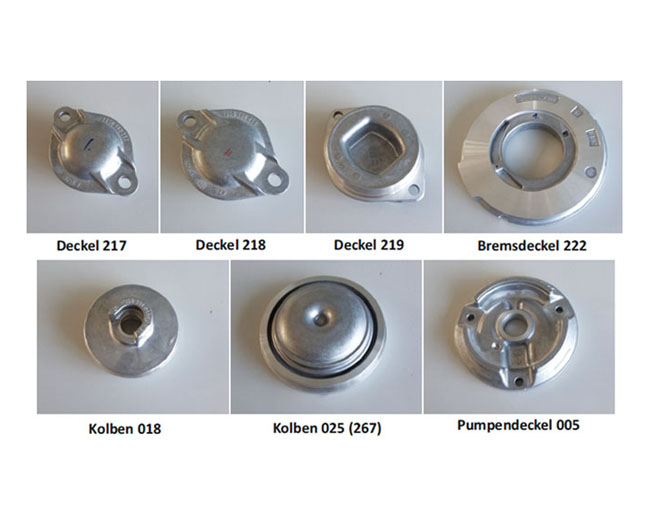
Cieľom článku je opísať proces automatizácie a robotizácie výrobného procesu, počas ktorého sa budú opracúvať hliníkové odliatky. Odliatky tvoria komponenty na automatickú prevodovku nákladného automobilu. Navrhnuté pracovisko bude vyrábať sedem druhov komponentov, s ktorými bude manipulovať. Úlohou robota bude odoberať polovýrobky, následne ich ukladať do výrobných strojov a po obrobení príslušných plôch hotové diely vyberať a ukladať na výstupné dopravníky. Postup návrhu linky vychádza z optimalizácie rozmiestnenia strojov, zariadení a priemyselného robota. Na optimalizáciu návrhu rozmiestnenia zariadení sa využije prostredie Fanuc Roboguide.
-
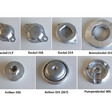
Obr. 1 Obrábané dielce
-

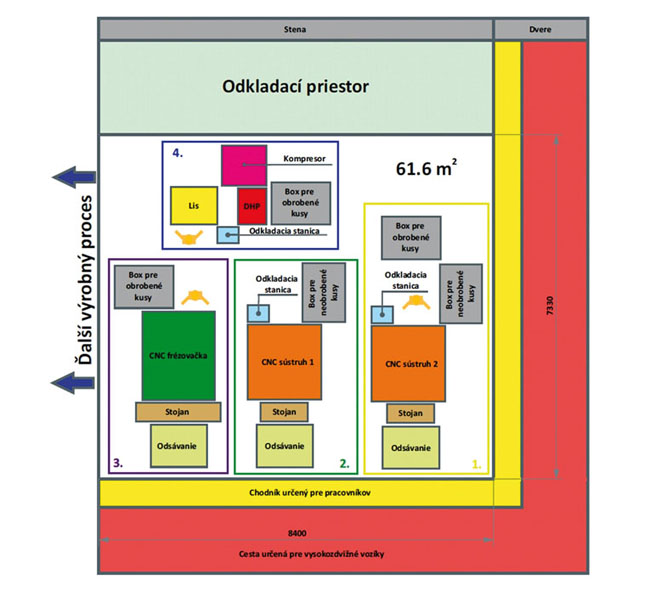
Obr. 2 Súčasné rozmiestnenie strojov a zariadení
-

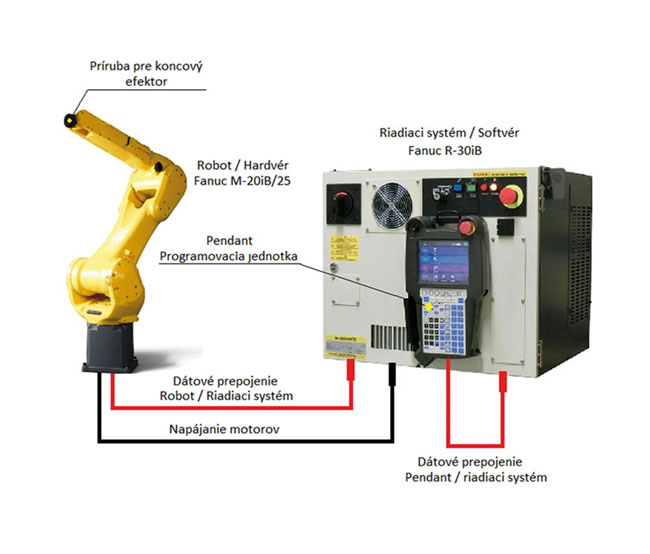
Obr. 3 Priemyselný robot Fanuc M-20i/25, riadiaci systém Fanuc R-30iB a pendant
-

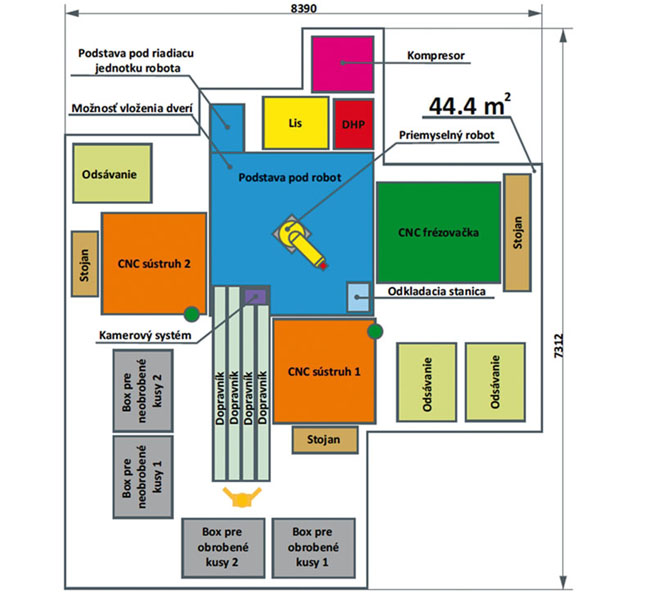
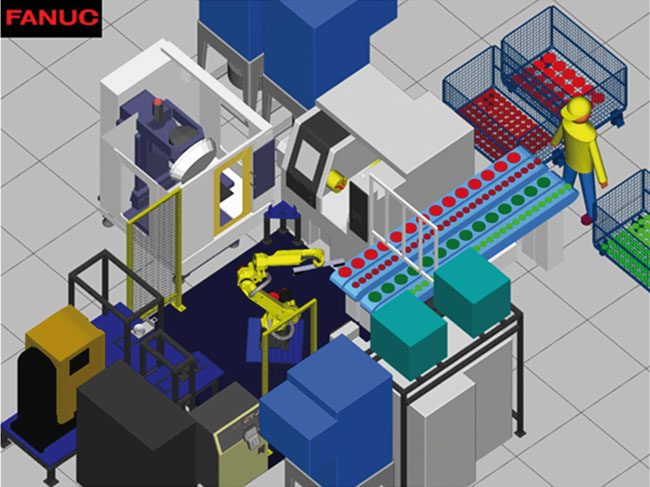
Obr. 4 Záverečný návrh linky
-

Obr. 5 Rozmiestenie strojov a zariadení v Roboguide