Algoritmus riadenia polohy pre pokročilú kolonoskopiu testovaný na platforme TERRINet
V rámci projektu TERRINet bol testovaný nový algoritmus na riadenie rastúcich robotov s mäkkou konštrukciou. Na realizáciu výskumného návrhu sa použila robotická platforma Stiff-Flop dostupná v inštitúte BioRobotics Institute of Scuola Superiore Sant’Anna (Pisa, Taliansko). Experimentálne výsledky tohto projektu sa zamerali na vedecké výzvy pre presnejší kolonoskopický výkon.
-

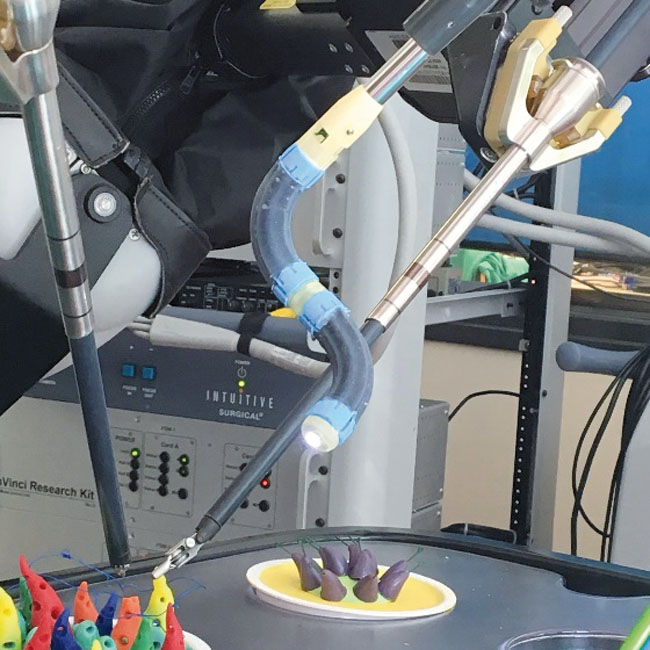
Obr.1
-
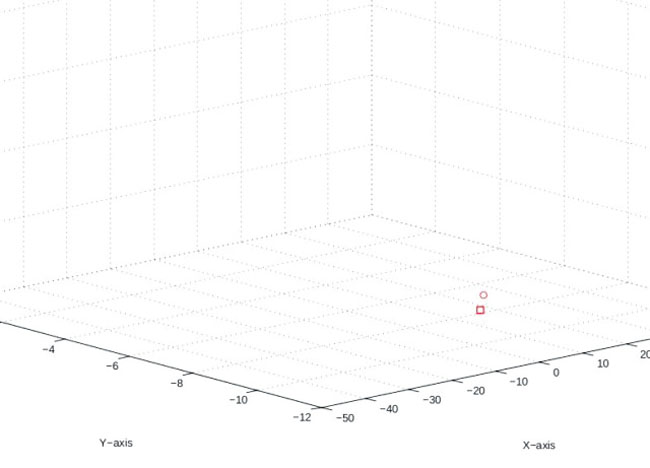
Obr.2
-
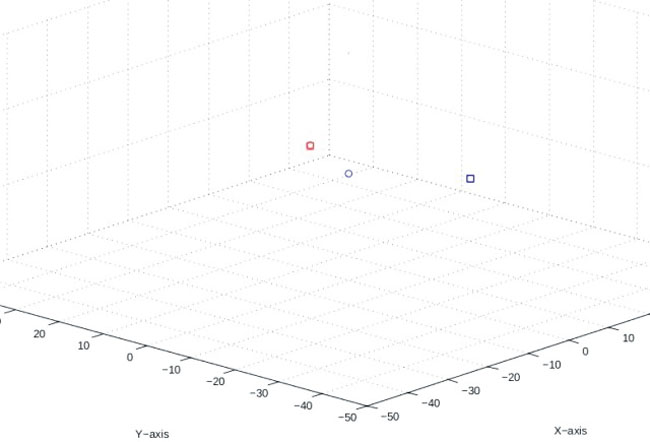
Obr.3
-

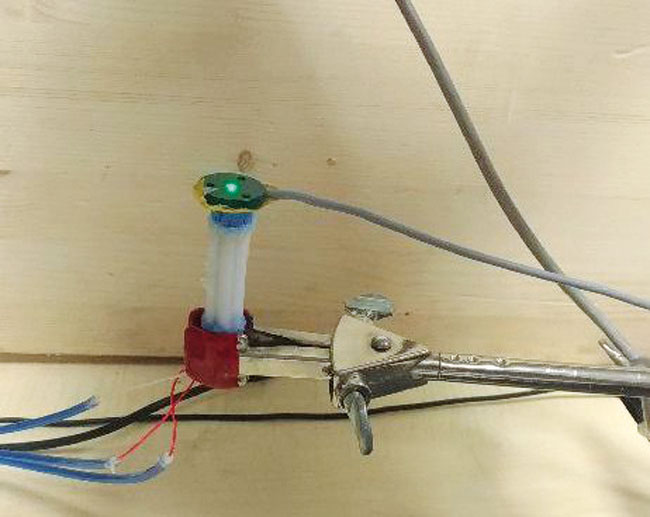
Obr.4