(3/2026) RAIMOC – keď sa robot učí terén aj reč
-
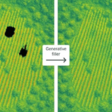
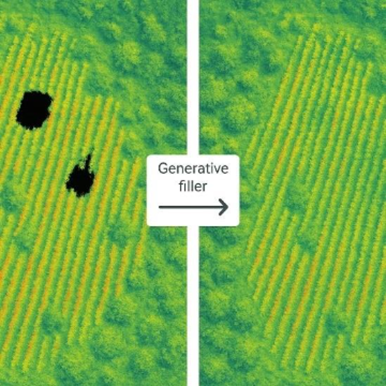
Obr. 1 Ilustrácia dopĺňania chýbajúcich miest v elevačnej mape pomocou generatívnej umelej inteligencie, aby bola mapa použiteľná na plánovanie pohybu.
-
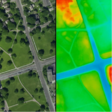
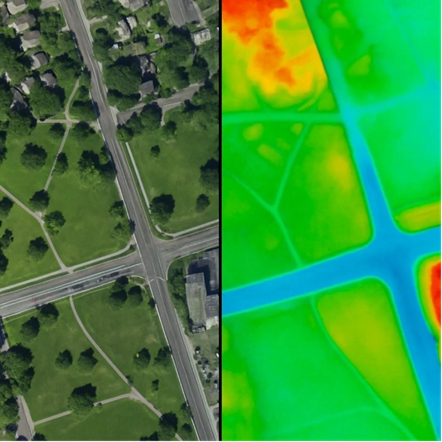
Obr. 2 Ilustrácia požadovaného výstupu – elevačná mriežka vhodná na spoľahlivé plánovanie trasy robota v teréne
-
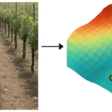
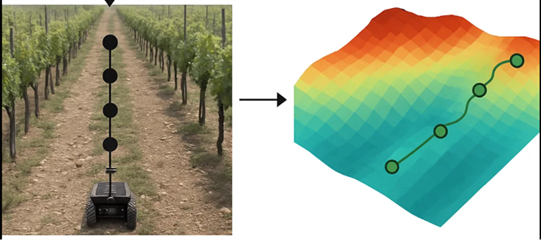
Obr. 3 Princíp modifikovania trajektórie robota na základe elevačnej mapy s využitím UI – trajektória sa prispôsobuje reálnemu tvaru terénu.
-
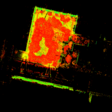
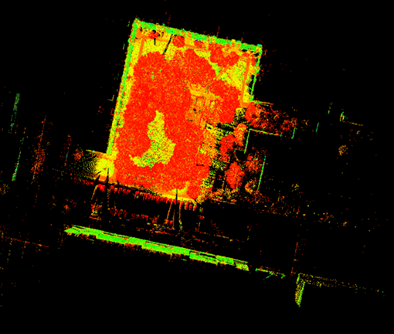
Obr. 4 Mračno bodov získané lidarovým mapovaním ako vstupný zdroj na tvorbu elevačnej mapy
-
Obr. 5 Elevačná mapa odvodená z mračna bodov – podklad vhodný na plánovanie optimalizovanej trajektórie