




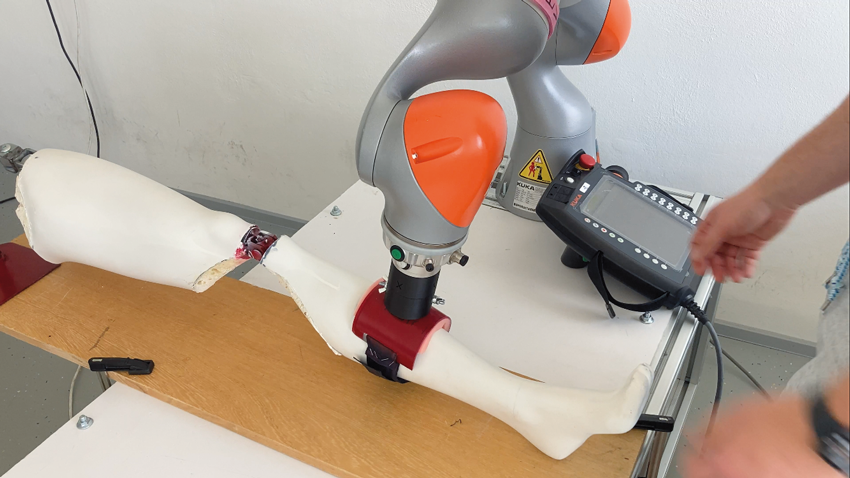
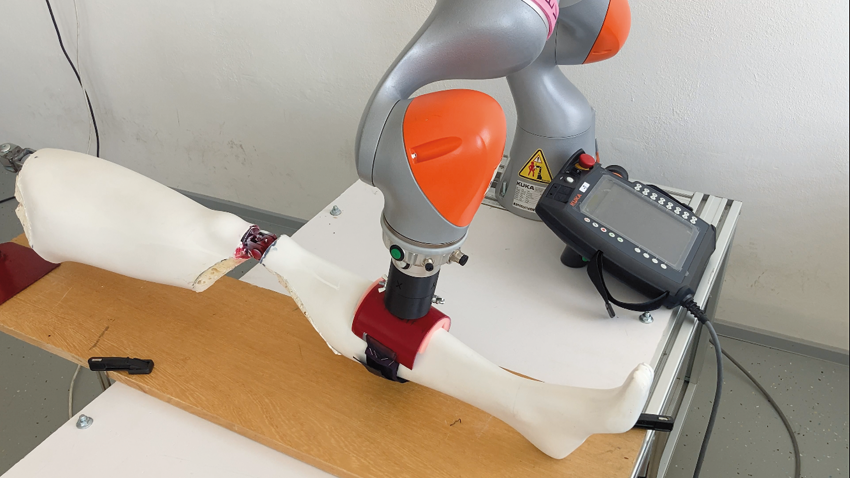


Inovácia v robotike nám v posledných desaťročiach umožnila posunúť hranice možnosti priemyselnej výroby, kvality a pod. V snahe preskúmať nové možnosti v oblasti medicíny som sa začal zaoberať vývojom metódy, ktorá by využívala kolaboratívne schopnosti silovo poddajného robota KUKA LBR IIWA. Tento robot si sám vypočíta potrebnú trajektóriu a eulerove uhly natočenia nástroja na základe dvoch bodov – polohy členku pacienta a miesta uchopenia nástroja na končatinu pacienta. Tieto informácie sú potom použité na vytvorenie optimálnej trajektórie pre rehabilitačný pohyb.
V súčasnej medicínskej praxi sú bežne implementované diagnostické a terapeutické zariadenia, ktoré často vyžadujú komplexný proces zabezpečenia pacienta, zahŕňajúci jeho fyzické umiestnenie a pripútanie v rámci týchto zariadení. Takéto konvenčné prístupy môžu vyvolať u pacientov značný stres a nepohodlie, keďže zahŕňajú obmedzenie ich mobility a často aj exponovanie ich tela v atypických alebo neprirodzených polohách.
Moje riešenie predstavuje radikálny odklon od týchto tradičných postupov. Konkrétne navrhujem robotický systém, ktorý zjednodušuje a humanizuje rehabilitačný proces. Táto platforma je navrhnutá tak, aby bola intuitívna v obsluhe a eliminuje potrebu prenášania alebo premiestňovania pacienta do oddeleného terapeutického zariadenia. Namiesto toho umožňuje vykonávať rehabilitačné procedúry priamo na pacientovom lôžku, čím sa minimalizuje rušivý vplyv spojený s tradičnými prístupmi a poskytuje pacientovi väčšie pohodlie.
V medicíne je bezpečnosť pacienta na prvom mieste, a toto som mal na pamäti najmä pri zavádzaní môjho robotického systému. Chcel som zaistiť, že každá interakcia medzi robotom a pacientom bude bezpečná.
Svoj vývoj som založil na norme ISO/TS 15066:2016, ktorá stanovuje bezpečnostné parametre pre kolaboratívne robotické systémy. Táto norma jasne definuje, aké sily a tlaky môžu byť uplatnené na rôzne časti ľudského tela. Ako príklad, sily pôsobiace na hlavu človeka sú obmedzené na nižšiu hodnotu v porovnaní s inými časťami tela.
Dôkladne som monitoroval môj robotický systém, aby vždy spĺňal tieto kritériá. V prípade akéhokoľvek náhodného kontaktu medzi robotom a pacientom som nastavil robot tak, aby okamžite prerušil svoju činnosť. Tieto kroky som podnikol nie len kvôli dodržiavaniu pravidiel, ale hlavne preto, aby som mohol ponúknuť pacientom riešenie, ktoré je nielen efektívne, ale aj maximálne bezpečné. Čo robí tento robotický systém ešte atraktívnejším, je jeho multifunkčnosť. Okrem primárneho zamerania na rehabilitáciu môže byť adaptovaný na vykonávanie rôznych iných medicínskych procedúr, čím sa stáva flexibilným nástrojom, ktorý môže byť aplikovaný v rôznych kontextoch zdravotnej starostlivosti. Táto adaptabilita zvyšuje hodnotu systému v rámci zdravotníckych zariadení a umožňuje rýchlejšiu návratnosť investícií do technologickej infraštruktúry.
Hoci je táto metóda rehabilitácie stále vo vývojovej fáze, ukazuje obrovský potenciál, najmä pre pacientov v ranej fáze rekonvalescencie po vážnych zdravotných komplikáciách. Treba však poznamenať, že toto riešenie zatiaľ nebolo otestované v reálnych podmienkach na skutočných pacientoch. Pred testovaním v praxi bude potrebné vykonať ďalšie úpravy vrátane vývoja medicínskej verzie robota a prispôsobenia uchopenia robota podľa zdravotníckych štandardov.
Je nespochybniteľné, že robotika v medicíne bude mať výrazný dosah na budúcnosť zdravotnej starostlivosti. Výskum je potrebný v každom aspekte tejto oblasti, od chirurgických zákrokov cez terapie až po farmaceutické úkony. „Osobne ma najviac láka pokračovanie v terapii rehabilitácie a som presvedčený, že spojenie vedy, technológie a medicínskeho poznania môže vytvoriť riešenia, ktoré zlepšia kvalitu života pacientov po celom svete.
Viac informácií o tejto problematike
Vypracoval: Bc. Martin Hrottek
xhrottek@stuba.sk
Vedúci práce: Ing. Ľuboš Chovanec, PhD.
lubos.chovanec@stuba.sk
Fakulta elektrotechniky a informatiky STU
Ústav robotiky a kybernetiky
Ilkovičova 3, 812 19 Bratislava