




Jednou z hlavných tém projektu je vývoj moderných metód mapovania a navigácie, ktoré zohľadňujú priechodnosť terénu a dokážu optimalizovať trajektóriu robota tak, aby bola bezpečná, energeticky efektívna a realizovateľná aj v komplikovaných podmienkach. V rámci riešenia sa analyzovali rôzne spôsoby tvorby elevačných máp – od satelitných snímok cez fotogrametriu a stereopáry vo vysokom rozlíšení až po lidarové mapovanie.
Práve elevačné mapy sú kľúčové, pretože poskytujú robotu informáciu o „tvare“ prostredia a umožňujú plánovať trasu nielen v rovine, ale aj s ohľadom na sklony, nerovnosti či nepriechodné oblasti. V projekte sa už testujú UI moduly na analýzu elevačných máp a identifikovali sa dve perspektívne oblasti, ktoré môžu výrazne zvýšiť kvalitu mapových podkladov.
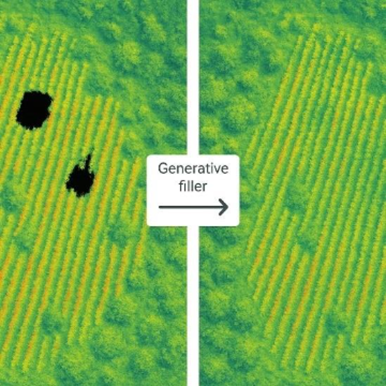
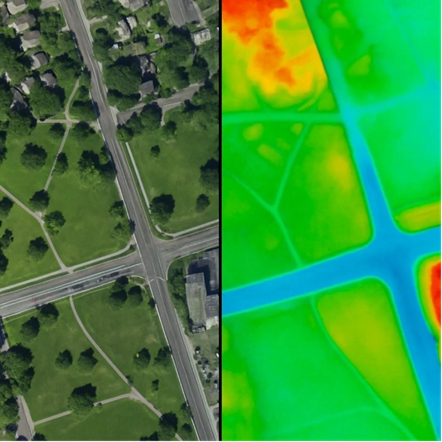
Prvou je dopĺňanie prázdnych miest v lidarových dátach, keď mapa obsahuje „diery“ spôsobené neúplným meraním alebo neprístupnosťou niektorých častí terénu. Druhou oblasťou je transformácia bežných snímok (napríklad zo satelitu alebo z dronu) do podoby elevačných mriežok. Ide o smer, ktorý by mohol výrazne zjednodušiť získavanie mapových podkladov v teréne, avšak vyžaduje kvalitné dátové podklady a dotrénovanie existujúcich neurónových sietí na špecifické typy dát.
Druhou dôležitou líniou projektu je vývoj jazykového modelu, ktorý umožní ovládať roboty hlasom a zároveň poskytovať operátorovi zrozumiteľnú spätnú väzbu. Takýto model má v reálnom čase rozpoznávať hlasové príkazy, správne ich interpretovať a informovať používateľa o stave a plánovaných akciách mobilných robotických platforiem. V aktuálnej fáze sa prototyp jazykového modelu testuje v kontrolovanom prostredí a v simulovaných scenároch, kde sa vyhodnocuje presnosť rozpoznávania povelov a spoľahlivosť reakcií a identifikujú sa situácie, ktoré vyžadujú optimalizáciu.
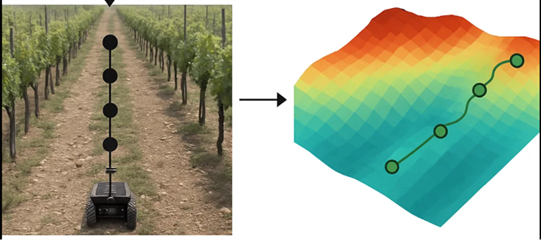
Cieľom je, aby bolo ovládanie robotov prirodzenejšie, rýchlejšie a menej náchylné na chyby – najmä v prostredí, kde operátor potrebuje reagovať okamžite. Projekt RAIMOC už priniesol čiastočné výsledky v oblasti modelovania navigácie, mapovania aj tvorby elevačných máp z lidarových dát. Postupne sa formujú princípy, kde sú priestorovo rozmiestnené body prechodu prepojené optimalizovanou trajektóriou získanou metódami umelej inteligencie, čo vytvára základ inteligentného plánovania pohybu v teréne.
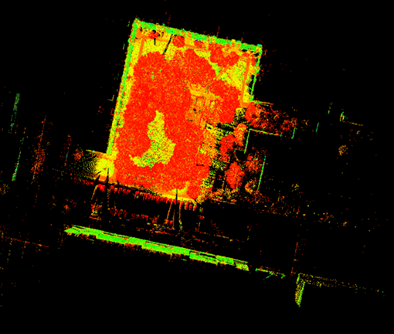
Zároveň sa pracuje s lidarovými dátami vo forme mračna bodov a s ich prevodom do georeferencovaných máp, ktoré sú priamo použiteľné pri plánovaní. Projekt postupuje v súlade s plánovaným rámcom, pričom niektoré časti vývoja vyžadujú intenzívnejšiu verifikáciu v ďalšom období. V nasledujúcej fáze bude cieľom najmä pripraviť datasety vhodné na dotrénovanie neurónových sietí na tvorbu elevačných máp, dôslednejšie testovať navrhnuté moduly a pokračovať v overovaní jazykového modelu tak, aby bol pripravený na integráciu do mobilných robotických platforiem.
Výsledkom projektu RAIMOC má byť odolný základ na budúce nasadenie mobilných robotov, ktoré sa budú vedieť pohybovať v náročnom teréne s vyššou mierou autonómie a zároveň budú ovládateľné jednoduchšie a prirodzenejšie – hlasom, v reálnom čase a s jasnou spätnou väzbou pre operátora.
Poďakovanie
Financované EÚ NextGenerationEU prostredníctvom Plánu obnovy a odolnosti SR v rámci projektu č. 09I05-03-V02-00039.
prof. Ing. František Duchoň, PhD., a kolektív projektu RAIMOC
frantisek.duchon@stuba.sk