


Základné typy asynchrónnych motorov
Podľa konštrukcie rozoznávame dva základné typy asynchrónnych motorov. Líšia sa konštrukciou rotora.
Asynchrónny motor s klietkou nakrátko (používa sa tiež spojenie s kotvou nakrátko) – vinutie rotora tvorí klietka z vodivého materiálu.
Asynchrónny motor s vinutým rotorom – v drážkach rotora je trojfázové vinutie vyvedené na krúžky a cez kefy na rotorovú svorkovnicu. Pri chode motora možno do obvodu rotora zapojiť odpory, ak chceme znížiť záberový prúd alebo inak ovplyvniť charakteristiku motora. Pri nominálnom chode motora by mal byť obvod rotora spojený nakrátko.
V praxi sa v súčasnosti používajú prevažne asynchrónne stroje s kotvou nakrátko.
Základné časti asynchrónneho motora
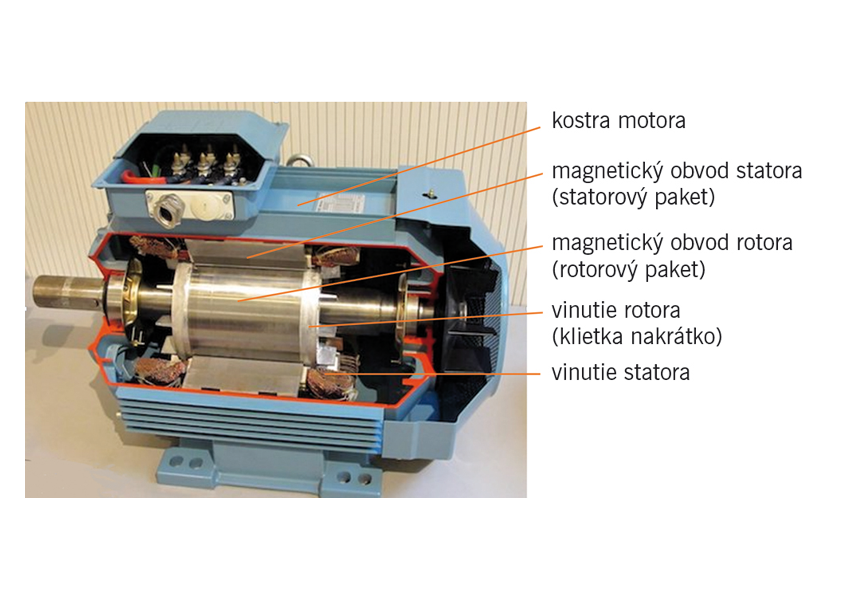
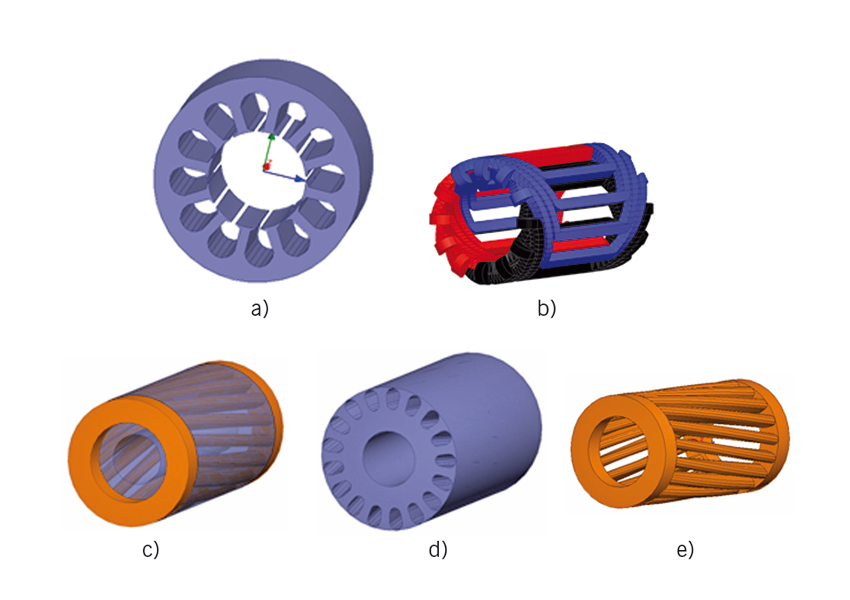
Kostra je nosným telesom asynchrónneho stroja (obr. 8). V kostre je umiestnený statorový zväzok plechov s vinutím, ktoré je v drážkach. V ložiskách, ktoré sú umiestnené v štítoch kostry, sa točí hriadeľ stroja. Ten nesie rotorový zväzok plechov s rotorovým vinutím, ktoré je tiež umiestnené v drážkach. Pre rotor s vinutím sa často používa označene kotva.
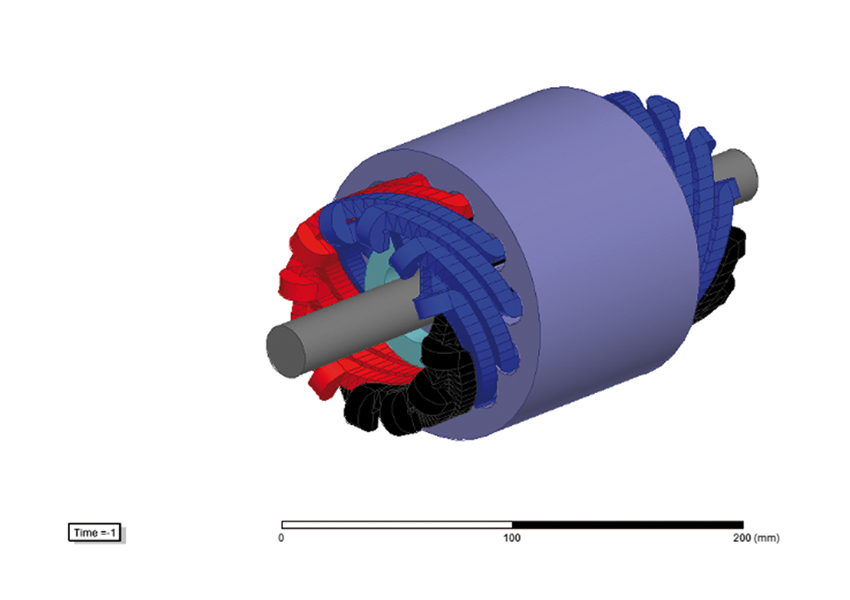
Magnetický obvod asynchrónneho motora (statora a rotora) je zložený z plechov, a to kvôli zníženiu hysteréznych strát a strát vírivými prúdmi. Príklad magnetického obvodu s vinutím dvojpólového trojfázového asynchrónneho motora je na obr. 9. Vinutia jednotlivých fáz sú označené farebne. Navzájom sú natočené o 120°.
Vinutie statora je uložené v drážkach statorového paketu. Môže byť zapojené do trojuholníka alebo do hviezdy. V motoroch s prepínateľným počtom pólov sa používajú špeciálne typy vinutí. Známe je napr. Dahlanderove zapojenie, ktoré sa používa pri prepínaní v pomere 1 : 2 [5]. Konce vinutia sú vyvedené na svorkovnicu.
Vinutím rotora nakrátko je tzv. klietka. Je to v podstate mnohofázový rotor. Rotor má toľko fáz, koľko má tyčí. Tyče sú uložené v drážkach rotorového paketu a na koncoch sú spojené kruhmi nakrátko. Okrem jednoduchých klietok sa vyrábajú aj dvojité klietky. Tvarom drážok a tyčí v rotore sa ovplyvňuje momentová charakteristika asynchrónneho motora. Motory malých výkonov majú obyčajne tyče v kruhovej drážke alebo v drážke v tvare kvapky (drážka typu V). Na zvýšenie záberového momentu sa vyrábajú rotory s vírovou klietkou, t. j. drážky sú dlhé a úzke, a tiež motory s dvojitou klietkou. Motory s dvojitou klietkou (tzv. Boucherotova klietka) majú vnútornú klietku pracovnú a vonkajšiu rozbehovú. Vnútorná klietka môže byť vyrobená z materiálu s nízkym odporom (meď, hliník) a vonkajšia z materiálu s väčším odporom (mosadz, bronz, silumín a pod.), ale väčšinou sú obidve klietky vyrobené z rovnakého materiálu.
Vinutie rotora asynchrónneho motora s vinutým rotorom je umiestnené v drážkach a cez klzný kontakt, ktorý tvoria vodivé krúžky a kefy, je vyvedené na rotorovú svorkovnicu.
Princíp asynchrónneho stroja
Princíp AS je založený na vzájomnom elektromagnetickom pôsobení točivého magnetického poľa vyvolaného statorovým prúdom a prúdov indukovaných týmto poľom v rotore. Vzhľadom na tento princíp sa asynchrónne stroje často nazývajú indukčné stroje.
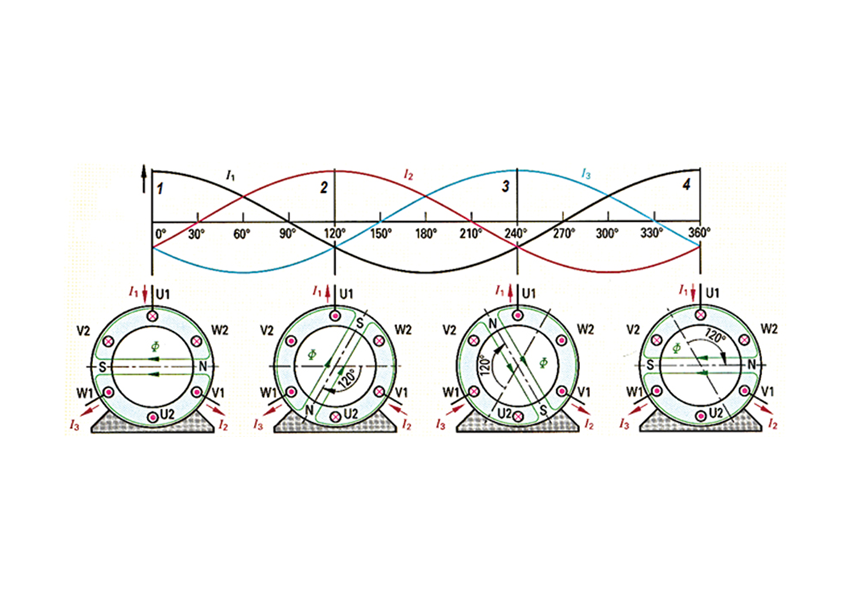
Točivé magnetické pole statora možno vytvoriť vinutím zloženým z m cievok s rovnakým počtom závitov umiestnených po obvode stroja rovnomerne o elektrický uhol rovný fázovému posunu jednotlivých fáz napájacieho súmerného m-fázového systému. Keďže rozvodná sieť je trojfázová, najrozšírenejšie sú trojfázové stroje, ale v špeciálnych prípadoch sa vyrábajú aj dvoj-, päť-, šesť-, sedem- alebo deväťfázové stroje. Trojfázové asynchrónne stroje majú na statore trojfázové vinutie, t. j. m = 3. Cievky jednotlivých fáz sú navzájom priestorovo posunuté o 360°/m = 360/3 = 120° elektrických a sú napájané trojfázovým napätím navzájom fázovo posunutým o 120°. Vznik točivého magnetického poľa v trojfázovom dvojpólovom stroji ilustruje obr. 11.
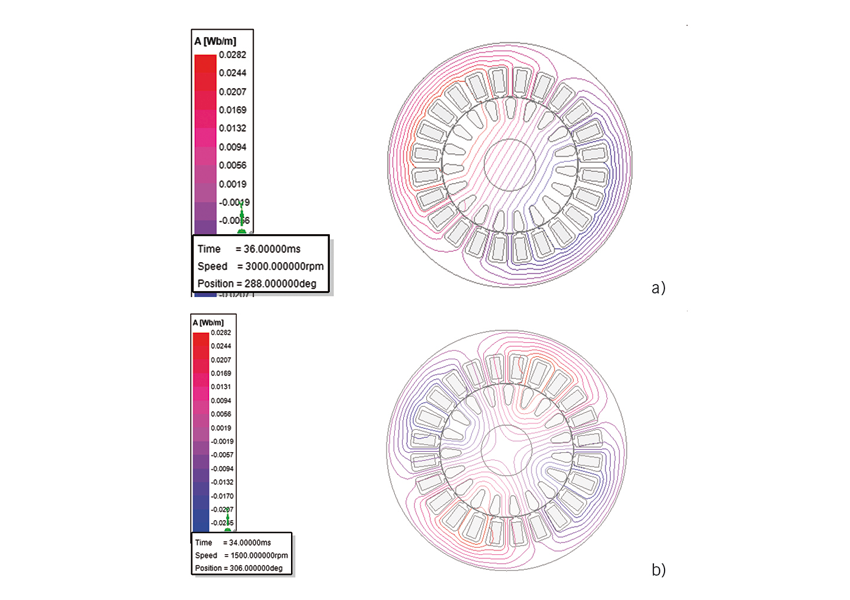
Na obr. 12 je zobrazené magnetické pole dvoj- a štvorpólového asynchrónneho motora.
V čase pripojenia asynchrónneho motora na sieť sa vytvorí točivé magnetické pole statora. V tomto točivom poli sa nachádza rotor, ktorého vinutie je spojené nakrátko. V rotore sa indukuje napätie a pretekajú prúdy. Na tyče rotora pôsobí točivý moment, ktorý roztočí rotor v smere točenia magnetického poľa. Rotor asynchrónneho motora sa musí otáčať pomalšie (asynchrónne) ako magnetické pole vytvorené statorovým vinutím. Ak by sa rotor točil synchrónne s magnetickým poľom statora, tak by sa v rotorovom vinutí neindukovalo napätie, rotorom by netiekol prúd a nevytvoril by sa točivý moment. Pomernú hodnotu rozdielu otáčok magnetického poľa a otáčok rotora nazývame sklz.
![]() (1)
(1)
kde
s je sklz,
ns – otáčky magnetického poľa (t. j. synchrónne otáčky),
n – otáčky rotora.
Synchrónne otáčky ns závisia od frekvencie napájacieho napätia f a počtu párov pólov p.
![]() [ot/min.] (2)
[ot/min.] (2)
Základné pracovné stavy asynchrónneho stroja sú:
- motorický chod, pre sklz platí 0 < s ≤ 1,
- generátorický chod, pre sklz platí s ≤ 0,
- brzdná prevádzka, pre sklz platí s > 1.
Generátorický chod nastane vtedy, keď je asynchrónny stroj poháňaný nadsynchrónnou rýchlosťou. Výhodou asynchrónnych generátorov oproti synchrónnym je nižšia cena. Nevýhodou je, že magnetizačný prúd potrebný na jeho prevádzku odoberajú zo siete. Pri ostrovnom režime preto musia byť k svorkám stroja pripojené kondenzátory. Ďalšou nevyhnutnou podmienkou je existencia remanentného magnetizmu.
Rovnice a náhradná schéma AS v ustálenom stave
Pre súmerný asynchrónny stroj v ustálenom stave platia rovnice (3) – (5) odvodené pre jednu fázu. V rovniciach preto vystupujú fázové veličiny napätia, prúdu, odporov a indukčností.
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
Pozn.: U2 = 0, pretože rotorové vinutie je spojené nakrátko. U2 ≠ 0 len v špeciálnych prípadoch asynchrónneho motora s vinutým rotorom, keď je stroj riadený napätím v rotore.
Ak prepočítame veličiny v rovnici pre rotor (4) na stator, dostávame:
![]() (6)
(6)
Prepočítavacie koeficienty sú pre napätie pu, pre prúd pi, pre odpory a reaktancie je to pz.
![]() (7)
(7)
kde
pu je napäťový prevod,
pi – prúdový prevod,
m1 – počet fáz statora (obvykle m1 = 3),
m2 – počet fáz rotora, pri AS s klietkou nakrátko je počet fáz daný počtom tyčí v rotore, pri AS s klietkou nakrátko je m1 ≠ m2,
kv1 a kv2 – činitele vinutia statora a rotora, t. j. koeficienty, ktoré zohľadňujú tvar vinutia statora a rotora AS,
R1 – odpor jednej fázy statora,
R2 – odpor jednej fázy rotora,
R2´ – prepočítaná hodnota odporu jednej fázy rotora na stator,
X1σ – rozptylová reaktancia jednej fázy statora,
X2σ – rozptylová reaktancia jednej fázy rotora,
X2σ´ – rozptylová reaktancia jednej fázy rotora prepočítaná na stator.
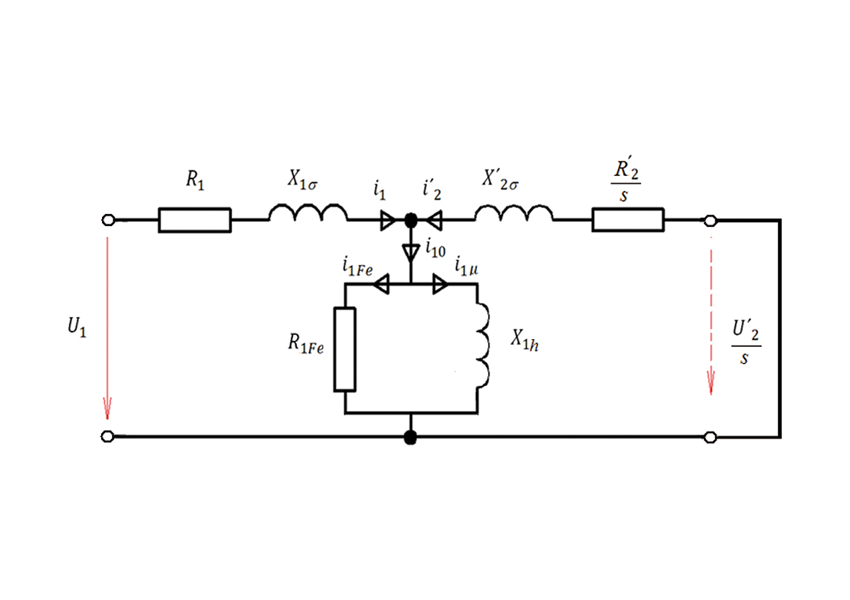
Uvedeným rovniciam zodpovedá náhradná schéma asynchrónneho stroja na obr. 13.
Točivé magnetické pole vytvorí pri vzájomnom pôsobení s rotorovými prúdmi točivý moment. Pre tento vnútorný moment asynchrónneho stroja platí vzťah:
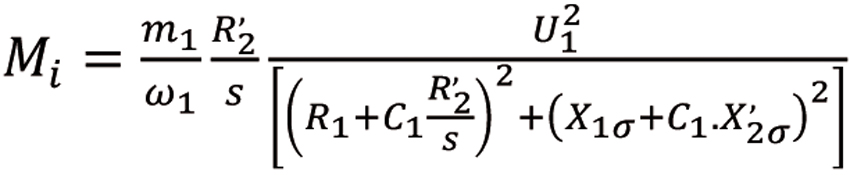 (8)
(8)
kde
m1 je počet fáz statora (obvykle m1 = 3),
ω1 – synchrónna uhlová rýchlosť,
C1 – koeficient rozptylu.
Koeficient rozptylu C1 zohľadňuje v rovnici (8) priečnu vetvu náhradnej schémy.
![]() (9)
(9)
kde
![]() (10)
(10)
![]() (11)
(11)
Za predpokladu, že Rfe >> Xh, môžeme napísať:
![]() (12)
(12)
C1 > 1 a býva v rozmedzí 1,04 až 1,08. Pri približných výpočtoch sa často vplyv koeficientu rozptylu zanedbáva a dosadzuje sa C1 = 1, čím C1 z rovnice vymizne.
Druhú mocninu prepočítaného prúdu rotora v rovnici pre vnútorný moment reprezentuje výraz:
 (13)
(13)
Ak zanedbáme priečnu vetvu náhradnej schémy, I1 ≅ I2´ a vzťah pre moment sa zjednoduší na tvar:
![]() (14)
(14)
V praxi, keď sú k dispozícii katalógové údaje motora, je často výhodné použiť na určenie momentu Klossov vzťah. Uvádzame zjednodušený Klossov vzťah, ktorý predpokladá, že C1 = 1 a R1 ≈ R1´.
 (15)
(15)
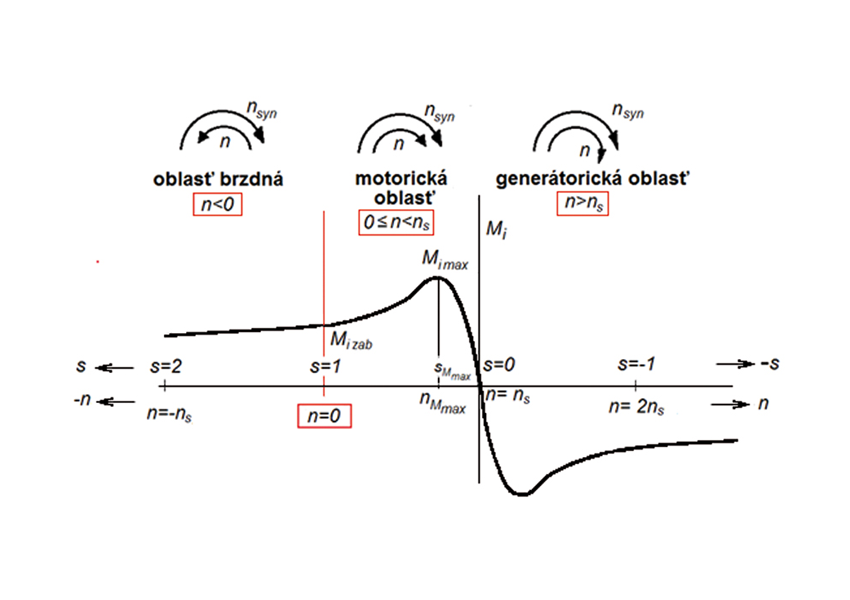
Momentová charakteristika asynchrónneho stroja je na obr. 14. Nad krivkou sú vyznačené pracovné režimy. Motor stojí, ak sklz s = 1; ak sa stroj otáča synchrónnou rýchlosťou, je s = 0. V motorickej prevádzke sú otáčky stroja v rozsahu 0 až ns, v generátorickom chode má stroj väčšie otáčky ako synchrónne. V tomto režime pohonný stroj otáča rotorom asynchrónneho motora. V brzdnej prevádzke sa rotor otáča proti smeru magnetického poľa. Sklz je väčší ako 1 a otáčky sú záporné.
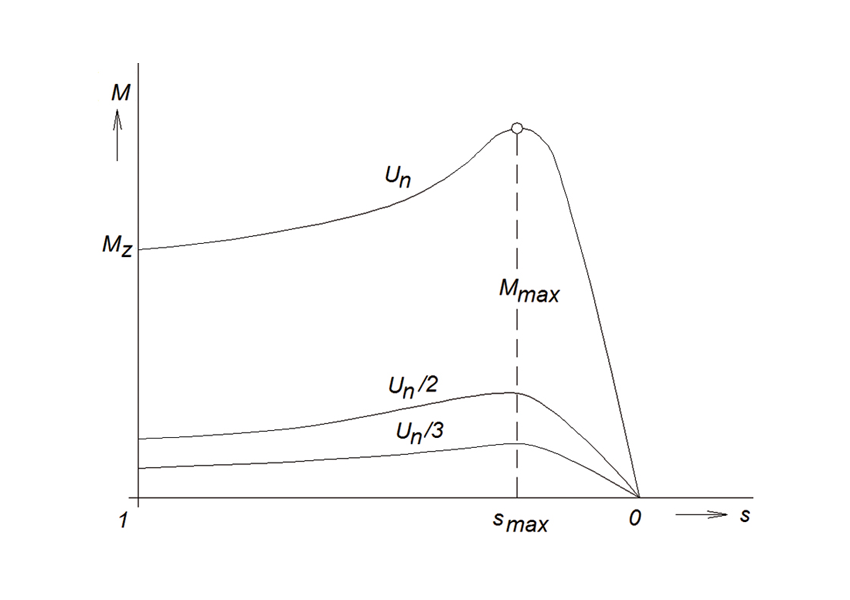
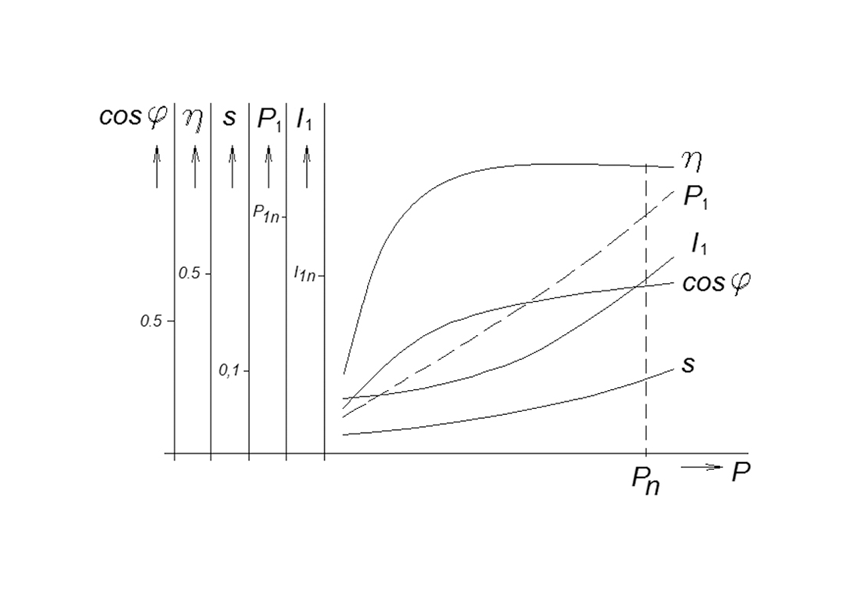
Zo vzťahu (8) je zrejmá kvadratická závislosť momentu AS od napätia. Túto zmenu ilustruje obr. 15. Priebeh prúdu I1, účinnosti η, príkonu P1, cosj a sklzu s v pracovnej oblasti je na obr. 16 (tvary kriviek sú z merania 4 kW štvorpólového asynchrónneho motora).
Klasifikácia AM
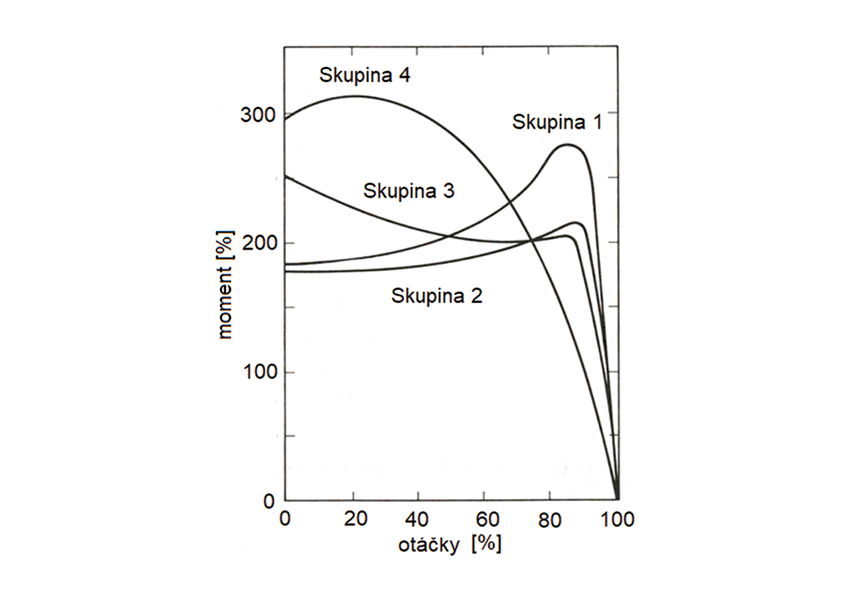
Asynchrónne motory sa vyrábajú v širokom rozsahu výkonov. Zákazník si môže vybrať z ponuky výrobcu požadovaný tvar momentovej charakteristiky. Tvary štandardných charakteristík vo výkonovom rozsahu do 150 kW sa dajú rozdeliť do štyroch skupín [2]. Typické charakteristiky pre jednotlivé skupiny sú na obr. 17. Krivky sú typické pre štvorpólové stroje a v rozsahu výkonov od 5,5 do 150 kW.
Skupina 1
Do skupiny 1 patria motory s vysokou účinnosťou pri nominálnom výkone Pn, pracujúce s nízkym sklzom. Motory majú jednoduchú klietkou s nízkym odporom. Maximálny moment majú väčší ako dvojnásobok momentu nominálneho (Mmax > 200 % Mn) pri sklze zvratu menšom ako 20 % a záberový moment približne 200 % Mn v oblasti malých výkonov a Mz ≅ 100 % Mn v oblasti veľkých výkonov. Záberový prúd je päť- až osemnásobkom nominálneho prúdu.
Skupina 2
Motory v tejto skupine majú záberový moment ten istý ako v skupine 1 pri asi 75 % záberového prúdu motorov skupine 1. Nominálny sklz a účinnosť sú podobné ako v skupine 1. Majú však trochu nižší cosj a nižší maximálny moment. Maximálny moment býva len málo nad 200 % nominálneho momentu. Tento typ charakteristiky je najbežnejší vo výkonovej triede od 5,5 do 150 kW pri motoroch, ktoré pracujú s konštantnými otáčkami.
Skupina 3
Motory v tejto skupine sa vyznačujú vysokým záberovým momentom pri nízkom záberovom prúde. Majú trocha nižšiu účinnosť a vyšší nominálny sklz ako motory v skupine 1 a 2. Vysoký záberový moment zabezpečuje dvojitá alebo tzv. vírová klietka.
Skupina 4
Pre motory v tejto skupine je charakteristický vysoký záberový moment pri nízkom záberovom prúde. Maximálny moment majú pri sklze v rozsahu 0,5 ÷ 1. Dôsledkom toho je pomerne vysoký nominálny sklz a následne nižšia účinnosť pri menovitej záťaži [2].
Označovanie tvaru charakteristík sa u jednotlivých výrobcov líši. V praxi výrobcovia motorov v katalógu vedľa ostatných údajov udávajú aj tvar momentovej charakteristiky. Označenie a skutočný tvar charakteristiky býva súčasťou katalógov.
Výkonová bilancia asynchrónneho motora
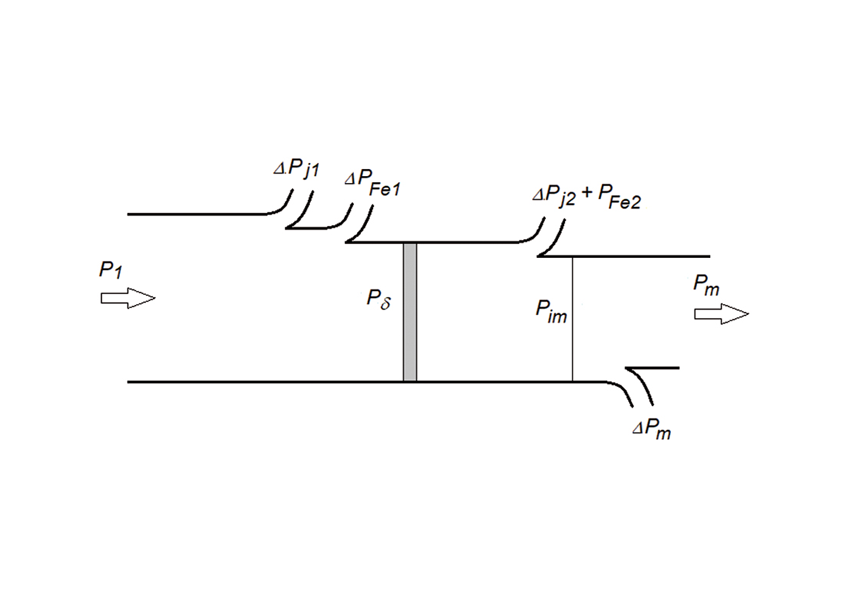
Do motora sa na statorové vinutie privádza vstupný príkon. Časť z neho sa spotrebuje na joulové straty v statore ΔPj1 a straty v železe statora ΔPFe1. Ostatná časť výkonu sa rovná výkonu vo vzduchovej medzere Pδ. Časť z Pδ sa spotrebuje na joulové straty ΔPj2 a straty v železe v rotore ΔPFe2. Rozdielom je vnútorný mechanický výkon Pim. Po odčítaní mechanických strát je na hriadeli výkon Pm.
Účinnosť stroja je daná podielom výstupného a vstupného výkonu. Trieda účinnosti asynchrónnych strojov sa označuje IEx (International Efficiency). Asynchrónne stroje sa vyrábajú v triedach účinnosti IE1 až IE4. Najvyššia účinnosť je v triede IE4, najnižšia v triede IE1. Je snahou Európskej komisie, aby mali asynchrónne motory v Európskej únii čo najvyššiu účinnosť. O požiadavkách na účinnosť asynchrónnych motorov hovorí Nariadenie komisie (ES) č. 640/2009 z 22. júla 2009, ktorým sa vykonáva smernica Európskeho parlamentu a Rady 2005/32/ES, pokiaľ ide o požiadavky na ekodizajn elektromotorov. Od 1. 1. 2017 musia všetky motory na trhu Spoločenstva s menovitým výkonom 0,75 – 375 kW dosiahnuť aspoň úroveň účinnosti IE3 alebo IE2, ak sa jedná o pohon s premenlivými otáčkami.
Jednofázové asynchrónne motory
V domácnostiach alebo tam, kde je k dispozícii len jednofázová sieť, sa používajú jednofázové asynchrónne motory. Označenie „jednofázové“ vychádza z napájania. Motory sú napájané z jednofázovej siete, ale v skutočnosti majú dve fázy, jednu hlavnú a jednu pomocnú. Pomocné vinutie je natočené voči hlavnému vinutiu o 90° elektrických a na vytvorenie fázového posunu napätia sa využíva obyčajne prídavný kondenzátor. Magnetické pole týchto motorov je eliptické. Pomocnú fázu možno po rozbehu odpojiť. V špeciálnych prípadoch má motor namiesto pomocnej fázy len tienený pól, t. j. závit nakrátko na časti statorového pólu.
Literatúra
[1] Fairclough, C.: Analyzing the Structural Integrity of an Induction Motor with Simulation. [online].
[2] Mohamed, E. El-Hawary: Principles of electric Machines with power Electronic Applications. Prentice-Hall International, Inc., 1987, USA.
[3] Tkotz, K. a kol.: Príručka pro elektrotechnika. Europa-Sobotáles, Praha 2006.
[4] Voženílek, P. – Novotný, V. – Mindl, P.: Elektromechanické měniče. Praha: ČVUT 2011.
[5] Chmelík, K.: Elektrické stroje v energetice. [online].
[6] Asynchrónne stroje. [online].
[7] Měřička, J. – Hamata, V. – Voženílek, P.: Elektrické stroje. Praha: ČVUT 1994.
[8] Chmelík, K. – Čech, V. – Bernat, P.: The evaluation of electric machines actual state. In: Sborník vědeckých prací VŠB-TU Ostrava. 1997, s. 45 – 55. ISSN 0474-8484.
Kolektív autorov:
Želmíra Ferková et al.
zelmira.ferkova@tuke.sk

