

Priemyselná zbernica EtherCAT bola predstavená na jar roku 2003 počas medzinárodného veľtrhu v Hannoveri. EtherCAT vyvinula firma Beckhoff a na základe jej rozhodnutia je dnes EtherCAT otvorenou zbernicou.
Vývoj nových technológií, z posledného obdobia môžeme spomenúť napr. EtherCAT P alebo navýšenie rýchlosti komunikácie na 1 Gbit/s v prípade EtherCAT G či 10 Gbit/s v prípade EtherCAT 10 G, je vždy v réžii firmy Beckhoff. Definovanie EtherCAT-u ako medzinárodného štandardu prebehlo v roku 2007. Šírenie know-how a informácií o technológii EtherCAT, rovnako ako pomoc s vývojom EtherCAT master aj slave zabezpečuje nezávislá organizácia EtherCAT Technology Group (ďalej ETG).
V súčasnosti je ETG najpočetnejšie združenie pôsobiace okolo priemyselnej zbernice založenej na ethernete. Členstvo v ETG je pre právnické subjekty zdarma a členom sa môže stať ktokoľvek, teda výrobcovia aj používatelia. Pôsobnosť ETG je celosvetová: spoločnosť sídli v Norimbergu a pridružené kancelárie sú v Amerike aj v Ázii. Členovia pochádzajú zo 69 krajín sveta a šiestich kontinentov. Aktuálne (marec 2021) je celkový počet členov približne 6 200, z toho viac ako 3 000 spoločností sa zaoberá vývojom a sú registrované s vlastným Vendor ID (jedinečné číslo výrobcov komponentov EtherCAT). Len výrobcov EtherCAT master je viac ako 220. Spoločností, ktoré vyvíjajú rôzne typy riadenia pohonov s rozhraním EtherCAT, je viac ako 180 a celkový počet ich produktov presahuje číslo 800. Podobne V/V produktov je na trhu viac ako 1 000 a o ich distribúciu sa stará približne 130 rôznych výrobcov.
Široká členská základňa a množstvo výrobcov aj používateľov robí z EtherCAT-u celosvetovo uznávaný štandard. Veľkou výhodou širokej členskej základne je konkurencia medzi jednotlivými výrobcami, z ktorej vyplýva aj významný tlak na cenu, kvalitu aj celkové náklady.
Jedinečné spracovanie rámcov
EtherCAT je priemyselná zbernica reálneho času na komunikáciu distribuovaných V/V s riadiacim systémom. EtherCAT ako jediná zo všetkých priemyselných zberníc založených na ethernete používa spôsob spracovania rámca (frame) metódou On the Fly, teda za chodu, resp. „za letu“. Tým sa EtherCAT stáva unikátnou a z pohľadu porovnania je metóda spracovania rámca podstatnou a základnou vlastnosťou, ktorá odlišuje EtherCAT od ostatných priemyselných zberníc založených na ethernete. Z uvedeného logicky vyplýva niekoľko špecifických vlastností, ktoré možno zhrnúť do marketingových pojmov uvedených ďalej. V technickom časopise sa však zameriame na technické detaily a opis jednotlivých pojmov prispôsobíme tak, aby sa uvedené marketingové pojmy stali základným sprievodcom a návodom na ceste k detailnému pochopeniu, ako EtherCAT funguje. Opis funkcie teda nebude samoúčelný, pretože pochopenie základných vlastností a mechanizmov celej smernice vedie k tomu, že následne používateľ vie zbernicu diagnostikovať a rozumie jej vlastnostiam natoľko, že je schopný ju efektívne využiť. A to je hlavný cieľ tohto seriálu článkov.
Základné vlastnosti a pojmy týkajúce sa zbernice EtherCAT:
- princíp On the Fly:
- optimálne využitie šírky páska,
- minimalizácia meškania,
- diagnostika na úrovni EtherCAT slave,
- topológia,
- protokol (frame),
- Real Time,
- presná synchronizácia,
- diagnostika a lokalizácia porúch.
On the Fly
Spracovanie rámca metódou On the Fly je v automatizácii unikátne. V IT svete je metóda spracovania On the Fly alternatívou častejšie používaného spôsobu, keď sieťové prvky (spravidla prepínače) na vstupe čakajú na rámec a ten po prijatí a vykonaní kontroly, že dáta sú platné, ich posiela ďalej podľa cieľovej IP adresy. Týmto spôsobom vzniká dopravné oneskorenie, ktoré je násobne väčšie ako oneskorenie, ktoré prirodzene zavádza aj mikroprocesor EtherCAT schopný prijímané dáta za chodu čítať, zapisovať, prípadne oboje, a rovno preposielať na svoj nasledujúci (výstupný) port.
Možno namietať, že týmto spôsobom sa v topológii posielajú aj poškodené rámce, ktoré by inak bežné sieťové prvky vedeli eliminovať. Nie je to úplne pravda. Táto metóda spracovania rámca, ktorú realizuje mikroprocesor, síce nemôže eliminovať poškodený rámec, no pre diagnostiku zbernice EtherCAT je naprosto zásadná. Vzhľadom na skutočnosť, že úplne každý EtherCAT slave obsahuje mikroprocesor, tzv. EtherCAT Slave Controller (ESC), tak na úrovni každého prvku EtherCAT slave sa vykonáva niekoľko kontrol, čím vzniká unikátna schopnosť kontrolovať správnosť zápisu aj čítania procesných dát a detegovať bitovo poškodené rámce, a to nielen na mieste vetvenia zbernice, ale na úrovni každého EtherCAT slave, ba čo viac, dokonca na úrovni všetkých aktívne používaných portov daného EtherCAT zariadenia. Inými slovami používateľ získa informáciu, medzi ktorými dvoma zariadeniami problém vznikol, a navyše aj o tom, v ktorom smere putovania EtherCAT rámca sa tak stalo. Ďalej možno pomocou tejto diagnostiky rozlíšiť, či je spojenie úplne prerušené alebo len narušené.
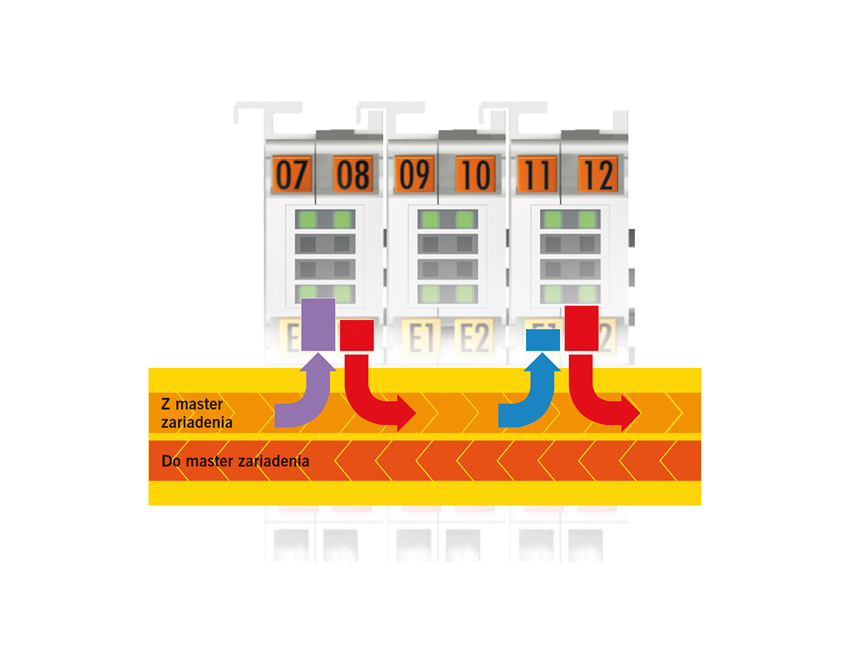
Z uvedeného vyplýva, že každý rámec EtherCAT putuje od EtherCAT master vždy celú topológiou až k poslednému EtherCAT slave a späť. Kontroly sa vykonávajú v oboch smeroch, výnimkou je len to, že pri ceste späť putuje EtherCAT rámec tou najkratšou možnou cestou. To znamená, že ak nejaký EtherCAT slave použil porty A, B aj C, cestou od EtherCAT master putuje rámec z portu A smerom k portu B a až keď obslúži túto časť topológie, je smerovaný na port C. Zatiaľ čo pri spätnej ceste k EtherCAT master prechádza z portu C priamou cestou na port A.
To je zásadný princíp zbernice EtherCAT a porozumenie spôsobu putovania rámca EtherCAT topológiou EtherCAT je základom pochopenia logiky celej zbernice. EtherCAT master posiela rámec EtherCAT do celej topológie. Nie je to tak, že by master každému slave posielal jeden rámec (resp. že by od každého zariadenia očakával samostatný rámec s dátami len od tohto jedného zariadenia). EtherCAT master pomocou spôsobu adresovania (FMMU) určí každému EtherCAT slave jeho miesto (adresný priestor medzi procesnými dátami EtherCAT rámca), z ktorého slave dáta číta, resp. do ktorej časti bude dáta zapisovať. Pomocou FMMU sa master aj slave „dohovoria“ na rozložení adresného priestoru EtherCAT rámca, a to tak, aby maximálne využili celý dátový priestor, ktorý ethernetový rámec ponúka. To je spôsob, ktorý je pre EtherCAT opäť unikátny. Aktuálne aj iné zbernice prechádzajú na podobný systém a využívajú spôsob balenia dát, ale nie je to princíp platný pre celú topológiu. Ide o lokálny spôsob platný pre niekoľko nadväzujúcich zariadení. To je dôvod, prečo sa o EtherCAT hovorí, že dokáže maximálnym spôsobom využiť šírku komunikačného pásma. Za plnej prevádzky EtherCAT master spracováva iba jednotky EtherCAT rámcov v každom PLC cykle bez ohľadu na veľkosť topológie.
Spracovanie EtherCAT rámca metódou On the Fly teda prináša niekoľko základných vlastností. Princíp sa opiera o efektívne využitie veľkosti rámca EtherCAT, mikroprocesor EtherCAT (ESC – EtherCAT Slave Controllers) vykonáva v každom zariadení slave kontrolu každého rámca a oneskorenie, ktoré tým vzniká, je pre celkový výkon zbernice úplne minimálne.
Uveďme príklad: 100 servomotorov a úloh polohovania možno obslúžiť približne sa 100 mikrosekúnd alebo 1 000 digitálnych V/V rozdelených medzi 125 zariadení slave za približne 30 mikrosekúnd. Ktorá iná zbernica dosahuje takéto časy? Tieto fakty dokazujú, prečo je EtherCAT efektívnou súčasťou riadiaceho systému, a tiež poslúžia ako vysvetlenie, prečo je v súčasnosti EtherCAT považovaná za najrýchlejšiu priemyselnú zbernicu.
Topológia
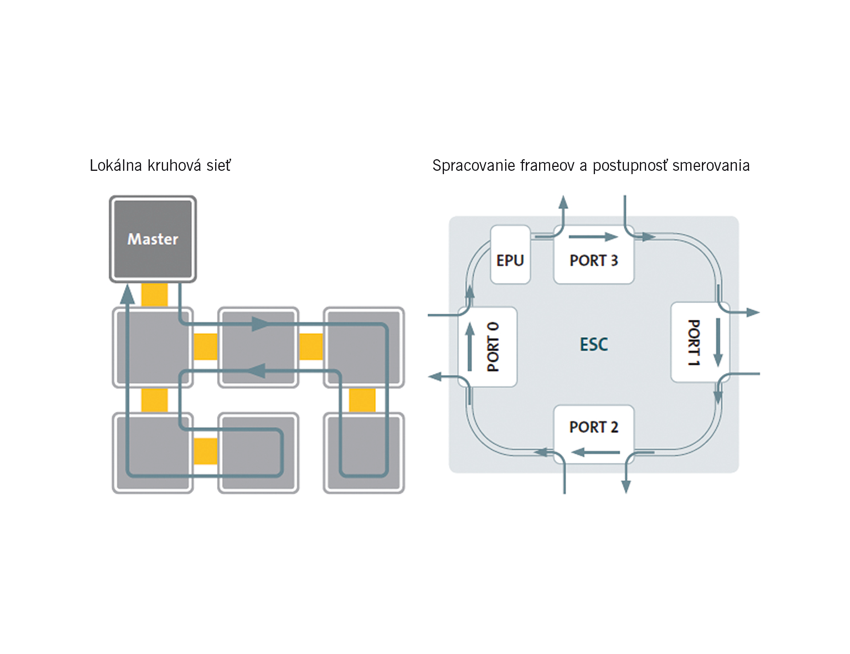
Topológia EtherCAT-u je úplne voľná. Bez obmedzení možno použiť líniové zapojenie rovnako ako zapojenie do hviezdy či topológiu Daisy Chain. V používateľských manuáloch k ostatným zberniciam založených na ethernete sa dočítame, že sa odporúča vyhnúť sa použitiu líniovej topológie. Tu treba uviesť, že práve vďaka použitým mikroprocesorom a metóde spracovania rámca spomínanou metódou On the fly nie je líniová topológia EtherCAT prekážkou. Naopak, líniové spojenie prináša najrýchlejší prenos, pretože slave zariadenie používa iba dva komunikačné porty. Jeden EtherCAT master môže riadiť až 65 535 zariadení slave a keďže najvyššia možná veľkosť procesných dát jedného EtherCAT slave je 64 kByte, maximálna teoretická veľkosť procesných dát, ktorú môže jeden EtherCAT master adresovať, je zaokrúhlene 4,2 gigabajtu. Topológiu EtherCAT možno štrukturalizovať pomocou vetvenia EtherCAT, resp. v terminológii EtherCAT-u tzv. junctions. Tieto sieťové prvky slúžia predovšetkým na vetvenie, ale pre samotný chod sú len doplnkom. Priepustnosť siete sa použitím týchto prvkov nemení.
Frame
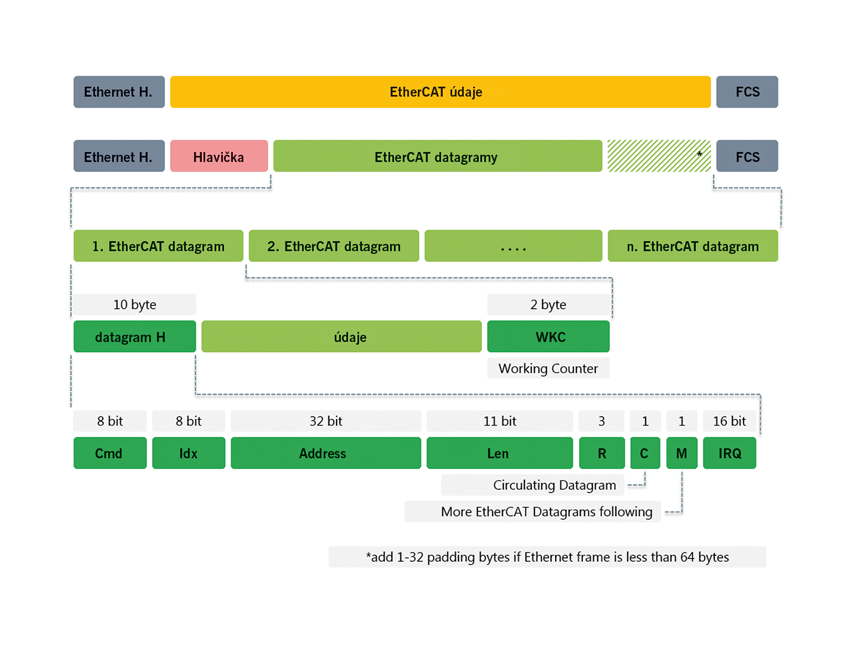
Rámec EtherCAT má štandardnú skladbu ethernetového rámca. Po ethernetovej hlavičke nasleduje časť EtherCAT, ktorá sa opäť začína hlavičkou a nasledujú dáta EtherCAT rozdelené do tzv. datagramov. Každý datagram má opäť svoju hlavičku, dátovú časť na procesné dáta a na konci 2 Byte priestor na tzv. Working Counter. Ide o priestor, ktorý každý EtherCAT slave prepisuje definovaným spôsobom po úspešnom spracovaní procesných dát; je to základ jedného z kontrolných mechanizmov, ktorý detailne opíšeme v niektorom z ďalších dielov tohto seriálu. Datagramov môže byť v jednom rámci EtherCAT maximálne 15. Pokiaľ treba definovať viac datagramov, EtherCAT master založí ďalší rámec EtherCAT. Za posledným datagramom je ešte priestor s veľkosťou 4 Byte na poslednú časť rámca, tzv. kontrolný súčet (FCS – Frame Check Sequence). Datagramy sú v praxi jednotlivé príkazy (command) EtherCAT. Zároveň platí, že jeden datagram, prípadne jeden command ETC, zodpovedá jednej synchronizačnej skupine. Problematiku synchronizačných skupín (Sync Units) a ich vplyv na fungovanie EtherCAT-u aj na diagnostiku podrobnejšie opíšeme v nasledujúcich dieloch.
EtherCAT ako zbernica reálneho času
Medzi výhody EtherCAT-u radíme aj jej možnosti práce v reálnom čase (Real Time). Tie sa vždy opierajú o presné časovanie Hard Real Time riadiaceho systému, ktorý vie svoje cyklicky volané úlohy nadväzovať na rámec EtherCAT. Tak sú si systémy, ktoré implementujú EtherCAT ako svoju základnú zbernicu, vždy podobné.
Synchronizácia, diagnostika a lokalizácia porúch
Synchronizácia dát na EtherCAT-e je veľká téma a jeden z hlavných obchodných argumentov. Synchronizácia je opretá o mechanizmus distribuovaných hodín (DC – Distributed Clock), ktoré umožňujú veľmi rýchlu a presnú synchronizáciu. Presnosť je vždy menšia ako 1 µs. Ako to systém pomocou mechanizmu distribuovaných hodín dosahuje, opíšeme v nasledujúcej časti seriálu.
Tému diagnostiky sme otvorili hneď v úvode článku pri opise základných vlastností. Diagnostika je silná stránka EtherCAT-u, a pretože je to dôležitá téma pre všetkých používateľov, budeme jej venovať samostatnú kapitolu tohto seriálu.
Výhody zbernice EtherCAT
- najrýchlejšie spracovanie dát,
- cenovo dostupné riešenie,
- jednoduchá implementácia a uvedenie do prevádzky,
- infraštruktúra bez nutnosti použiť vetvenie,
- integrácia ďalších v priemysle bežne používaných zberníc,
- jediná dostupná verzia,
- široká ponuka produktov.
Konečný používateľ a zákazník sa na technické záležitosti vždy pozerá s nádejou, aké výhody by tieto riešenia znamenali práve pre jeho úlohy či projekty. Pozrime sa teda na základné pojmy ako na zákaznícke výhody, pričom použijeme stále tie isté technické pojmy, aby sme si predstavili benefity z pohľadu používateľov a technických riešení.
Môže sa to zdať ako protirečenie, keď niečo, čo je najrýchlejší, je zároveň cenovo dostupné. V bežnom živote veľa takých príkladov nenájdeme. No už v úvode sme spomenuli, aká veľká konkurencia medzi výrobcami panuje. Veď len výrobcov mikroprocesorov EtherCAT (EtherCAT Slave Controller) je na svete 12. A ak celé technické riešenie nevyžaduje žiadnu špeciálnu technológiu, EtherCAT master nie je technicky založený na žiadnej špeciálnej hardvérovej platforme, nepotrebuje na svoju činnosť žiadny koprocesor a stačí RealTime kompatibilný sieťový adaptér, potom nie je dôvod, aby to tak nebolo. Podobne aj na strane zariadenia EtherCAT slave sú základom EtherCAT kompatibility jednoduché mikroprocesory so štandardnou implementáciou, kedy nasadenie nie je predražené žiadnou zbytočnou technickou ani administratívnou záťažou.
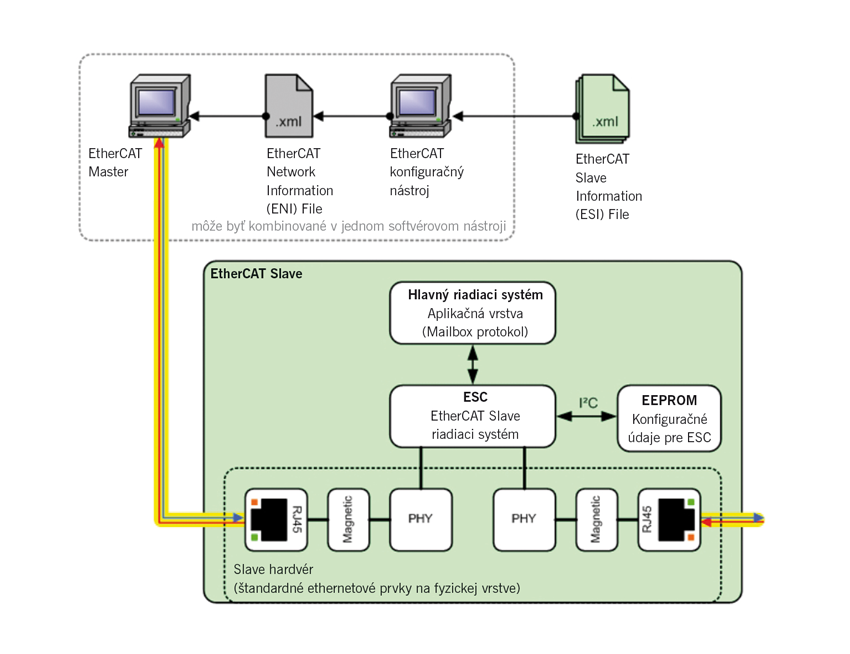
Už sme spomenuli, že celá topológia EtherCAT funguje bez akýchkoľvek priemyselných prepínačov. Čo nie je potrebné pre funkciu, to netreba kupovať (teda zaplatiť), ani sa zaoberať inštaláciou, napájaním či konfiguráciou; a predovšetkým ak niečo nie je vôbec použité, netreba to ani servisovať a už vôbec nie meniť. Tým pokračuje výpočet úspor, ale zároveň prechádzame k spôsobu implementácie. Od projekčných prác cez inštalačné až po programátorské. Tu opäť nadviažeme na metódu spracovania rámca (On the Fly), ktorá v konečnom dôsledku spôsobí, že rámec EtherCAT prechádza celou topológiou podľa daných pravidiel a v konkrétnom poradí, čím pri uvádzaní technológie do prevádzky odpadá nutnosť fyzicky adresovať zariadenia EtherCAT. Žiadne miniatúrne prepínače netreba manuálne nastavovať, aby mohol EtherCAT master identifikovať jednotlivé zariadenia slave v topológii, aj keď by išlo o zariadenie rovnakého typu. Každý EtherCAT master vie automaticky určiť celú topológiu pomocou funkcie scan topológie EtherCAT. To je ďalšia podstatná výhoda, pretože vďaka zabudovanému protokolu CANopen over EtherCAT (CoE) môžeme kompletne všetkým zariadeniam v topológii nastaviť potrebné parametre priamo z EtherCAT master. Vďaka jednotnému spôsobu parametrizácie (CoE) nie sú potrebné ďalšie programy. Každý EtherCAT slave nesie základný popisný súbor (tzv. ESI file), ktorý výrobcovia parametrizujú podľa najčastejšieho spôsobu použitia. Tým sa pri skenovaní novej topológie jednotlivým zariadeniam EtherCAT slave odovzdajú ich predvolené nastavenia, čo skráti čas potrebný na sprevádzkovanie zbernice EtherCAT.
Pravidlá fungovania však nie sú zväzujúce. Topológiu možno meniť, rozširovať atď. Stačí, aby EtherCAT master dostal možnosť zmeny načítať a uložiť. Také jednoduché je to aj s topológiou takpovediac staršieho dáta vydania. Pretože ani pri tých najstarších inštaláciách nemusí zákazník premýšľať nad kompatibilitou. Aj tú najstaršiu topológiu možno rozšíriť o najnovšie a najmodernejšie technológie. Jednoducho len preto, že EtherCAT od svojho vzniku nebola zmenená. Ako bola raz definovaná, taká zostala, nevznikajú žiadne čiastkové verzie, ktoré by používatelia museli rešpektovať. To je ďalší veľmi významný aspekt, ktorý ocenia práve tí, ktorí už podobné obmedzenia z dôvodu nekompatibilných verzií a zariadení museli riešiť a týmto obmedzeniam sa prispôsobiť. Pritom zachovanie jedinej verzie neznamená žiadne funkčné kompromisy a ani technické obmedzenia.
Z uvedeného vyplýva, že EtherCAT bola od svojho vzniku definovaná veľmi exaktne a funkčne ucelene. Je prekvapujúce, akú efektívnu a funkčnú zbernicu možno vytvoriť na prvý pokus bez nutnosti revízií a rozširovania, pritom dodnes z pohľadu technických riešení stále inšpirujúcu.
Zdroje
[1] https://www.ethercat.org/default.htm
[2] https://www.ethercat.org/download/documents/EtherCAT_Device_Protocol_Poster.pdf
[4] https://www.youtube.com/user/EtherCATGroup/featured
Text článku bol preložený z pôvodného českého originálu.
Pokračovanie v ATP Journal 7/2021.
David Smělík
Beckhoff Automation s.r.o.
