

Terminológia
Rovnako ako veľa iných vecí v technickej praxi, aj snímanie polohy vytvorilo súbor špecifickej slovnej zásoby, ktorá nie vždy presne vystihuje danú problematiku alebo je aj nejasná. Základom je, že hovoríme o snímačoch polohy (tiež známych ako enkodéry, prevodníky, detektory alebo vysielače), ktoré poskytujú nepretržité meranie polohy v celom rozsahu, či už na lineárnej, alebo rotačnej osi. Snímače priblíženia, ktoré merajú prítomnosť alebo neprítomnosť komponentu, nie sú v tomto článku zahrnuté.
Je tiež užitočné zamyslieť sa nad rozdielom medzi kontaktnými a bezkontaktnými snímačmi polohy, pretože tieto dva typy majú odlišné technické charakteristiky a líšia sa aj cenovo. Obľúbeným pravidlom je, že najlacnejšie kontaktné snímače polohy majú zvyčajne nižšie začiatočné náklady, zatiaľ čo bezkontaktné snímače sa budú ľahšie integrovať a môžu ponúknuť dlhšiu životnosť s nižším opotrebovaním. No ako uvidíme ďalej, to je dosť zjednodušený pohľad.
Ďalší rozdiel, v niektorých aplikáciách veľmi dôležitý, je medzi absolútnymi a inkrementálnymi snímačmi. Inkrementálne snímače budú hlásiť pohyb iba ako rozdiel v hodnote od ich začiatočného bodu; keď sú vypnuté, môžu sa vrátiť do východiskovej polohy, aby sa zabezpečilo, že budú pokračovať v hlásení zakaždým z rovnakého bodu. Naproti tomu absolútne snímače hlásia konkrétnu polohu bez vzťahu k inému bodu. Po vypnutí a zapnutí budú naďalej hlásiť jedinečnú hodnotu pre danú pozíciu a nevrátia sa do východiskového bodu.
Čo rozumieme pod pojmom lepší výkon?
Ak na výber snímača nemáme veľa času, osvedčeným spôsobom je ísť podľa toho, čo vždy fungovalo, alebo porovnať technické atribúty z niekoľkých údajových listov, získať cenové ponuky a vybrať si možnosť s najnižšou cenou, ktorá vyhovuje špecifikácii danej aplikácie. Lepší výkon vo väčšine prípadov znamená väčšiu presnosť, rozlíšenie, vzorkovaciu frekvenciu atď. Vyhráva snímač s najlepšími charakteristikami, ktoré zodpovedajú danej aplikácii a cenovým možnostiam investora.
Ak je však čas, zvážte aj iné možnosti, ktoré môžu vďaka lepšiemu snímaniu ešte viac vylepšiť daný proces. Nové riešenia snímačov poskytujú príležitosť na uskutočnenie významných zmien v celom rade produktov tým, že ponúkajú väčšiu odolnosť, menší priestor na inštaláciu, vyššiu rýchlosť aktualizácie, vyššie rozlíšenie a lepšiu linearitu v rámci širšieho rozsahu. A stále sme nevymenovali všetky. Na niektoré implikácie sa pozrieme podrobnejšie v ďalšej časti článku.
Ak chcete využiť tieto možnosti, musíte starostlivo zvážiť výber technológie snímača polohy. Existuje široká škála snímačov polohy a výber nesprávneho môže znamenať náročný boj o dosiahnutie požadovaného výkonu.
Sprievodca typmi snímačov polohy – výhody a obmedzenia
Najpoužívanejšie riešenia na trhu spadajú do piatich hlavných tried.
Potenciometre
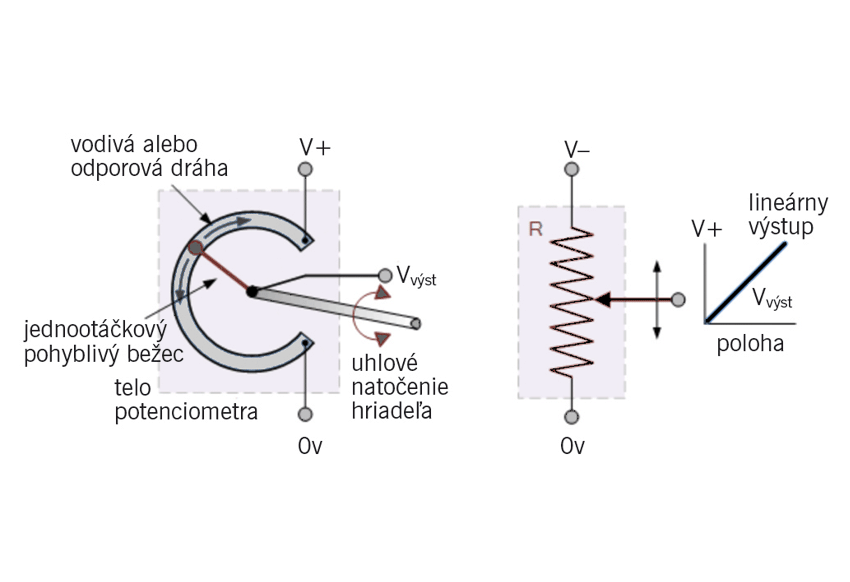
Široko používané potenciometre sú kontaktné snímače polohy, ktoré využívajú posuvný kontakt pripevnený k pohyblivej časti na pohyb po odporovej dráhe. Výstup sa bude líšiť v závislosti od polohy posuvného kontaktu na dráhe, takže odpor je úmerný polohe. Vďaka zakriveniu konštrukcie dráhy možno potenciometre použiť na rotačné aj lineárne meranie.
Tento jednoduchý merací princíp znamená, že potenciometre sa už mnoho rokov používajú v lacných aplikáciách s nenáročnými výkonnostnými kritériami a patria medzi najjednoduchšie a najlacnejšie snímače polohy. Ľahko sa používajú a sú dostupné v širokej škále veľkostí a tvarov. Neodporúčajú sa však na nič iné ako pre nenáročné prostredie; odporová dráha je ľahko erodovaná nečistotami alebo vibráciami a presnosť a opakovateľnosť sú nízke. Ak ide o vysoký výkon a trvanlivosť, potenciometer nie je vhodným riešením, no ako pri väčšine vecí, ak sa na tesnenie vynaloží dostatok peňazí, vyhotovenie a ochrana sa dajú zlepšiť.
Magnetostrikčné snímače polohy
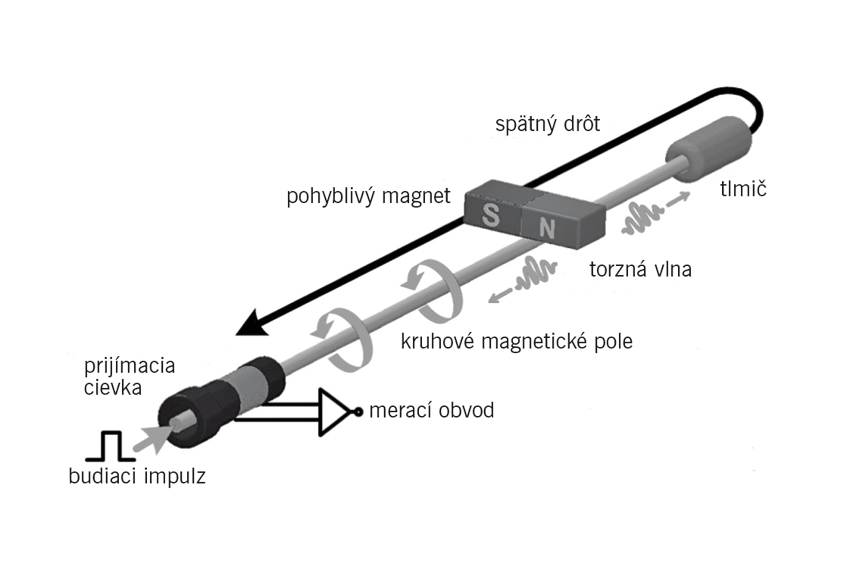
Niektoré feromagnetické materiály (kobalt, nikel, železo) po umiestnení do magnetického poľa menia veľkosť alebo tvar. Magnetostrikčné senzory využívajú tento efekt. Aplikáciou magnetického poľa na tieto materiály vzniká napätie, ktoré možno použiť na odhad polohy magnetického poľa.
Pozičný permanentný magnet je v prípade tohto snímača pripojený k cieľovému objektu a vlnovod k stacionárnej časti stroja. Magnet sa používa na vytvorenie impulzu magnetického poľa, ktoré napne vlnovodný drôt v bode, kde je cieľ. Toto napätie vytvára deformačný impulz, ktorý sa pohybuje známou rýchlosťou pozdĺž vlnovodu k snímacím cievkam, kde sa meria časový rozdiel medzi impulzom a snímaním.
Toto je technika, ktorá funguje skôr pre lineárnu ako pre rotačnú polohu. Pás vlnovodu a jemné snímacie jednotky musia byť dobre chránené, aby sa predišlo pôsobeniu vonkajších zdrojov mechanického napätia, čo znamená, že tieto snímače sú náročné na výrobu a vyžadujú individuálnu kalibráciu. V dôsledku toho majú zvyčajne vyššiu cenu a používajú sa v aplikáciách s vysokou hodnotou.
Dokonca aj s krytom nie sú tieto snímače vhodné pre aplikácie s vysokými vibráciami alebo rázmi. Výpočet času prechodu impulzu znamená, že existuje aj minimálna dĺžka (zhruba <100 mm), pod ktorou nie je meranie možné. Dôležitý je aj vplyv teploty – extrémy, ktoré spôsobujú expanziu, môžu ovplyvniť presnosť magnetostrikčných senzorov a v tomto zmysle treba vnímať aj údaje uvedené v katalógových listoch.
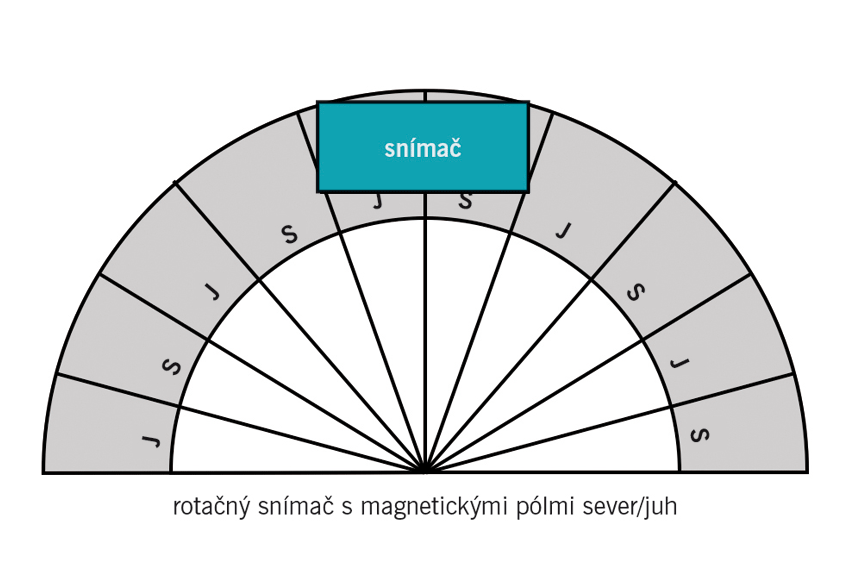
Magnetické enkodéry
Enkodéry vo všeobecnosti používajú stupnicu na meranie polohy cieľového objektu voči pevnej časti stroja. V magnetických enkodéroch je táto stupnica označená množstvom magnetických pólov – pripevnením snímača k pevnému bodu a meraním magnetických pólov pri prechode okolo snímača možno určiť polohu cieľa. Existuje množstvo snímačov na meranie magnetických pólov, ale najobľúbenejšie sú snímače s Hallovým efektom, ktoré menia svoje napätie v pomere k magnetickému poľu.
Ide o široko používané lacné snímače vhodné pre aplikácie, ktoré nevyžadujú linearitu pod 1 %, inými slovami, aplikácie, kde presnosť nie je prvoradá. Pracujú s úzkymi mechanickými toleranciami, ktoré môžu pridať určitú zložitosť a náklady na výrobu. Z tohto dôvodu si treba starostlivo prečítať údajové listy. Ak je dôležitá presnosť, bude potrebné starostlivo kontrolovať teplotu. Ak to nie je uvedené v údajových listoch, postupujte opatrne.
Magnetické enkodéry môžu byť citlivé na celý rad vonkajších faktorov vrátane magnetickej hysterézy, vonkajších DC/AC polí a skresľujúcich účinkov magneticky vodivých materiálov (napr. kov). Časom môžu magnetické enkodéry priťahovať kovové častice (trosky), čo môže tiež ovplyvniť ich presnosť. Stručne povedané, ide o snímače vhodné pre riešenia citlivé na cenu, kde nie je prvoradá linearita/presnosť a kde možno dobre kontrolovať ďalšie faktory, ako je teplota a mechanické umiestnenie.
Optické enkodéry
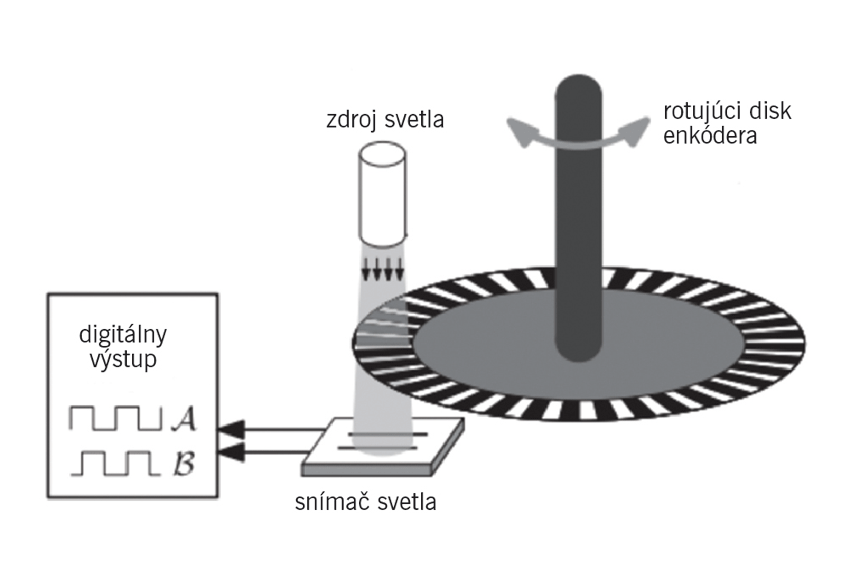
Populárna alternatíva k magnetickým sú optické enkodéry, ktoré, ako už názov napovedá, využívajú na identifikáciu cieľa svetlo. Zasvietením svetla na detektor a prerušením tohto zdroja svetla mriežkou alebo sieťkou, ktorá kóduje polohu cieľa, vytvorí detektor svetla digitálny výstup, ktorý možno použiť na nájdenie polohy cieľa.
Ako pri magnetických enkodéroch, aj tu zahŕňa tento jednoduchý princíp množstvo rôznych variantov: svetlo môže svietiť cez mriežky alebo sa môže odrážať späť, môže sa použiť viditeľné alebo infračervené svetlo, kódovacím kotúčom môže byť sklo alebo iný priehľadný materiál. Optické snímače možno použiť na určenie lineárnej aj rotačnej polohy a drahšie produkty, ak sa používajú správne, môžu ponúknuť vysokú presnosť a rozlíšenie. V dôsledku toho sú obľúbené v mnohých aplikáciách priemyselnej automatizácie.
V nenáročnom prostredí je ich výkon dobrý, ale veľkú pozornosť treba venovať ich presnej montáži, pretože akékoľvek nesprávne zarovnanie má výrazný vplyv na linearitu. Z tohto dôvodu sú kódovací disk, snímač a elektronika spracovania často zabalené vnútri krytu vrátane ložísk. Tesnenia sa zvyčajne pridávajú do prostredia, kde sa vyskytuje prach, rázy alebo vlhkosť. Optické enkodéry tiež nie sú vhodné pre zariadenia, ktoré pracujú v chladnom prostredí alebo prostredí s vysokou vlhkosťou; kondenzácia môže ovplyvniť spoľahlivosť týchto snímačov.
LVDT/RVDT
Indukčné snímače majú dobrú povesť pre svoju odolnosť a presnosť a sú prvou voľbou pre celý rad aplikácií vyžadujúcich vysokú spoľahlivosť v náročnom prostredí. Niekoľko typov snímačov je založených na indukčnom princípe vrátane jednoduchých bezdotykových spínačov, snímačov s premenlivou indukčnosťou a pod. Ponúkajú celý rad výkonu, pokiaľ ide o náklady, rozlíšenie a linearitu.
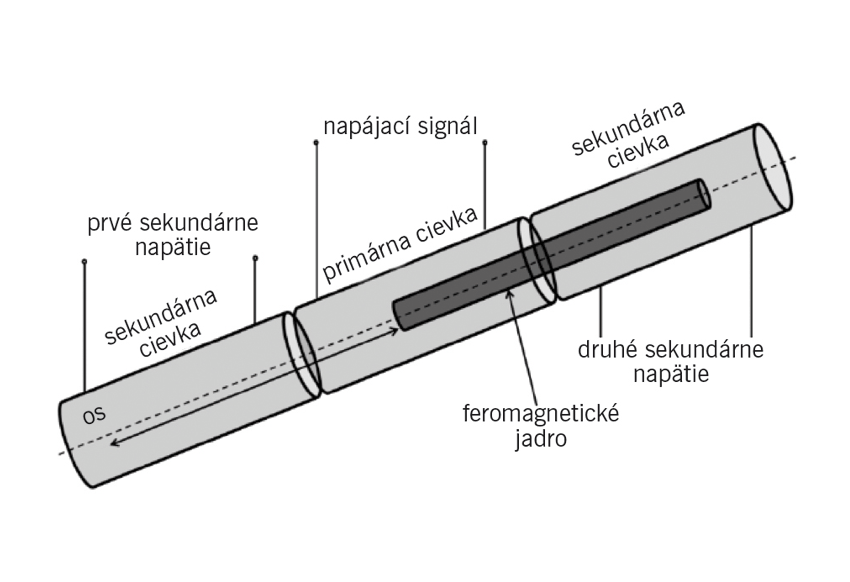
Typickými príkladmi sú LVDT (linear variable differential transformer) na lineárne meranie a RVDT na rotačné. V týchto snímačoch primárne cievky budia sekundárne cievky v kryte snímača. Elektromagnetické pole v sekundárnych cievkach sa potom bude meniť v pomere k ich väzbe na pohybujúce sa feromagnetické jadro. Použitím viacerých prijímacích cievok a výpočtom polohy na základe pomeru signálu v každej cievke možno odstrániť skresľujúce faktory, ako je teplota.
Indukčné snímače nie sú ovplyvnené nečistotami a vlhkosťou a keďže snímacie komponenty môžu byť umiestnené ďaleko od citlivej elektroniky, sú vhodné do veľmi drsného prostredia. No aj tieto typy snímačov majú svoje obmedzenia; niektoré potrebujú tienenie pred rozptylovými magnetickými poľami, pre LVDT/RVDT sú presné vinutia objemné a relatívne drahé, čo obmedzuje ich použitie v aplikáciách s vyššou hodnotou v oblastiach, ako je letecký a spracovateľský priemysel.
Rezonančné indukčné snímanie polohy
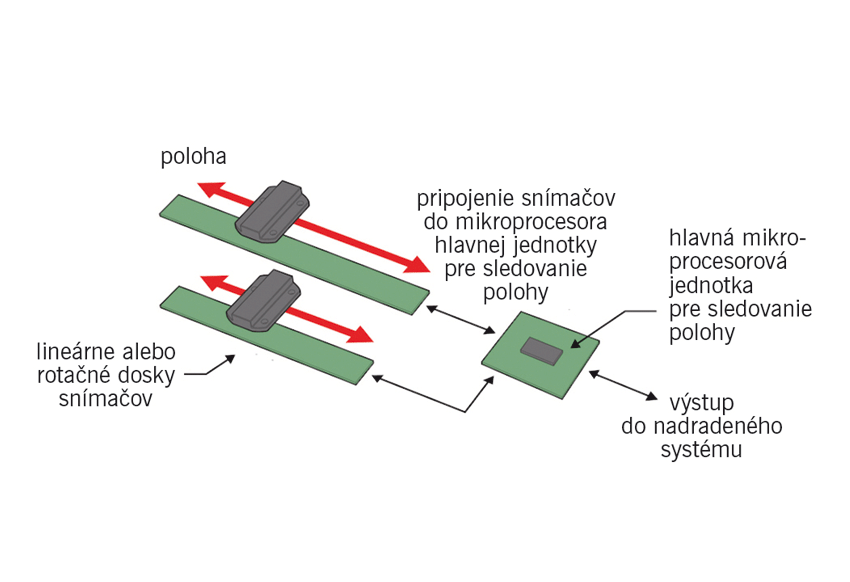
Moderná evolúcia indukčných snímačov, ktoré získavajú na popularite v mnohých aplikáciách, sa pretavila do rezonančných indukčných snímačov polohy, ktoré eliminujú nevýhody z hľadiska rozmerov a nákladov umiestnením cievok priamo na dosku plošných spojov. To ponúka vyššiu presnosť pri výrazne znížených nákladoch a priestorových nárokoch.
Použitím elektrického rezonátora na cieľovej pozícii môže systém využiť impulzný echo prístup – rezonátor je indukčne napájaný budiacim obvodom, potom je napájanie odpojené a systém deteguje odozvu cievok snímania polohy na cieľ. Tým sa zo systému odstránia chyby krížovej väzby a vytvorí sa oveľa lepší signál a vyššia tolerancia nastavenia bez akejkoľvek kalibrácie.
Celkovo je rezonančné indukčné snímanie polohy veľmi vhodné pre akúkoľvek aplikáciu, ktorá vyžaduje vysoký výkon – dá sa skonštruovať na veľmi vysokú úroveň linearity a ponúka vysoké vzorkovacie frekvencie. Je ešte odolnejšie ako tradičné metódy indukčného snímania polohy a vyžaduje len malú ochranu pred nečistotami, vlhkosťou, vibráciami alebo rázmi.
Pre aplikácie s veľkým objemom výroby, ako je automobilový priemysel, ovládanie otáčania a nakláňania, ovládanie motora alebo inteligentné ventily, môže tento nový prístup otvoriť vyššiu úroveň výkonu.
Zhrnutie
Pri špecifikácii snímača je najdôležitejšie, aby ste mali úplne jasno v tom, čo má snímač robiť, ako aj o dodatočných nákladoch na návrh riešenia, aby sa zabezpečilo, že snímač bude fungovať podľa špecifikácie. Ochrana, pripojenie a spracovanie, to všetko zvyšuje náklady. Na druhej strane, aj pri identifikácii dodatočných nákladov je dôležité zvážiť dodatočný výkon v systéme ako celku, ktorý môže byť odomknutý správnym snímačom, a pridať ho do svojich požiadaviek.
Presnejším snímaním polohy možno zabezpečiť celý rad zlepšení systému, napríklad:
- lepšie meranie polohy (presnejšie, včasnejšie, priamejšie) umožňuje riadiacim systémom priraďovať vstupy s väčšou presnosťou, čím sa dosahuje vyššia efektívnosť,
- je to dôležité pri ovládaní motora v aplikáciách, ako sú nízkorýchlostné sledovacie systémy pre monitorovacie kamery,
- vyššia spoľahlivosť/odolnosť celého zariadenia,
- umožňuje realizovať analýzu produktov a služby prostredníctvom zberu lepších údajov.
Zdroj: How to select a position sensor. Cambridge Integrated Circuits, Inc. White paper. [online]. Citované 4. 11. 2022.
-tog-
