


Riadenie pohybu
Riadenie pohybu je v podstate podsystém priemyselného automatizačného systému. Synchronizuje a riadi viacero motorov s cieľom dokončiť požadovaný pohyb. Napríklad viacosové robotické rameno vyžaduje niekoľko motorov, ktoré budú bezproblémovo spolupracovať pri konkrétnom pohybe. Riadenie pohybu sa používa hlavne na plánovanie trajektórie a rýchlosti, realizáciu interpolačného algoritmu a konverziu kinematiky. Systémy riadenia pohybu sa často vyskytujú v aplikáciách tlače, balenia, montáže a pod.
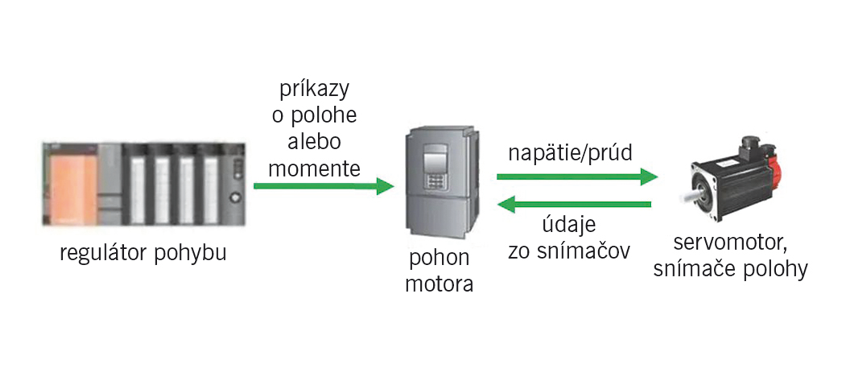
Systém riadenia pohybu zvyčajne pozostáva z týchto hlavných komponentov:
- Regulátor pohybu, ktorý generuje plánovanie trajektórie a potom posiela riadiace príkazy pohonu motora.
- Pohon motora premieňajúci riadiace príkazy z regulátora pohybu (zvyčajne údaj o rýchlosti alebo krútiacom momente) na signál vyššieho napätia alebo prúdu, ktorý priamo ovláda chod motora.
- Motor/motory, ktoré vykonávajú pohyb podľa riadiacich príkazov.
- Snímače polohy, ktoré poskytujú údaje o polohe/rýchlosti rotora motora regulátoru polohy/otáčok na dosiahnutie presného riadenia polohy/otáčok.
Riadenie motora
Na druhej strane riadenie motora je systém alebo technika, ktorá sa viac venuje riadeniu otáčania motora. Typický systém riadenia motora upravuje jeden alebo viacero parametrov krútiaceho momentu, rýchlosti a polohy jednotlivého motora tak, aby sa dosiahli cieľové hodnoty. V závislosti od typu motora sa požiadavky a techniky na jeho pohon môžu značne líšiť. Regulátor motora zvyčajne nemá schopnosť plánovať – pokročilejšie pohony majú jednoduché možnosti plánovania polohy a rýchlosti.
Keď poznáme rozdiely medzi týmito dvoma systémami, je zrejmé, že požiadavky na návrh, výber alebo zdroje pre ne sú tiež celkom odlišné. Riadenie motora je prioritne zamerané na to, aby sa motor správne točil, alebo skôr na správnu komunikáciu smerom na ďalšie zariadenia. Aby to bolo možné zabezpečiť, regulátor motora musí byť vybavený rozhraniami na komunikáciu s rôznymi snímačmi, musí dokázať spracovávať analógové aj digitálne signály, ako aj generovať rôzne signály zabezpečujúce pohyb motora. To všetko sa deje vo veľmi krátkej časovej slučke, ktorá sa môže pohybovať od 50 do 300 µs.
Riadenie pohybu často funguje ako nadradený systém, ktorý vyžaduje komunikáciu medzi viacerými pohonmi motora a inými zdrojmi, ako je prenos údajov cez ethernet (EtherCAT a TSN), CAN, RS485 a príkazy z rozhrania človek – stroj (HMI). Ako už bolo spomenuté, regulátor pohybu sa môže tiež podieľať na niektorých úlohách riadenia motora, ako je riadenie rýchlostnej, polohovej alebo dokonca momentovej slučky. Preto sa rýchlosť vykonávania príkazov v riadiacej slučke regulátora pohybu v reálnom čase môže meniť od 100 µs až po stovky milisekúnd v závislosti od toho, v akej aplikácii je regulátor pohybu nasadený.
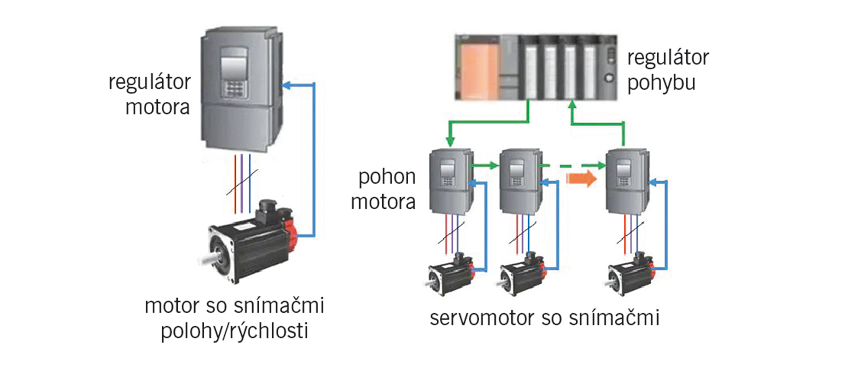
Riadenie pohybu viacerých osí v reálnom čase
Samostatnou kapitolou je riadenie pohybu a synchronizácia viacerých osí prostredníctvom zberníc využívajúcich reálny čas. Tradičný prístup k riadeniu pohybu je realizovaný tak, že regulátor pohybu, zvyčajne PLC, posiela údaje o polohe do regulátora motora cez sieť pracujúcu v reálnom čase. Regulátor motora pozostáva z troch kaskádových spätnoväzbových slučiek s vnútornou slučkou riadiacou krútiaci moment/prúd, so strednou slučkou riadiacou rýchlosť a s ďalšou slučkou riadiacou polohu. Momentová slučka má najväčšiu šírku pásma a polohová slučka najnižšiu. Spätná väzba z prevádzky sa spravuje lokálne na regulátore motora a je úzko synchronizovaná s riadiacim algoritmom a modulátorom šírky impulzu.
Avšak v súčasnosti sa už používajú aj iné prístupy „rozdeľovania“ riadenia, v ktorých sú polohové a/alebo rýchlostné slučky implementované na strane regulátora pohybu a hodnoty rýchlosti/krútiaceho momentu sa prenášajú cez sieť. Aktuálne trendy v tomto odvetví naznačujú posun smerom k novej metóde rozdeľovania, v ktorej sú všetky riadiace slučky presunuté z regulátorov motora do výkonného regulátora pohybu na hlavnej strane siete. Nová topológia riadenia má však aj svoje nevýhody. Odstránením riadiacich algoritmov z regulátora motora sa stratí úzka synchronizácia vykonávania programu a V/V. Čím väčšia je šírka pásma riadiacej slučky, tým väčším problémom je strata synchronizácie V/V, pretože slučka moment/prúd je obzvlášť citlivá na synchronizáciu.
Literatúra
[1] Hou, D.: From motor control to motion control. What does it take? Smarter World Blog, NXP Semiconductors. [online]. Publikované 26. 5. 2022.
[2] Sorensen, J. – O´Sullivan, D. – Aaen, Ch.: Synchronization of Multiaxis Motion Control over Real-Time Networks. MyAnalog. [online]. Publikované február 2019.
-tog-
