3D model prostredia ako výsledok senzorickej fúzie (1)
V nasledujúcom seriáli článkov bude prezentovaný algoritmus, ktorý realizuje fúziu dát získaných zo zariadení umiestnených na mobilnej meracej platforme, pričom výsledkom tejto fúzie je 3D model reálneho objektu. Na získanie informácií o okolitom priestore používame laserové skenery a následne využívame fúziu dát z laserových skenerov a prijímača GPS. 3D model sa skladá z mračna bodov a plôch z nich vygenerovaných. V článku ozrejmíme niektoré základné pojmy z problematiky fúzie dát a predstavíme navrhnutý a otestovaný prístup na vytvorenie 3D modelu reálnych objektov s ich textúrami. Jednotlivé kroky fúzneho algoritmu boli prakticky overené a ich výsledky sú zverejnené v článku.
-

Obr. 1 Mobilná meracia platforma
-

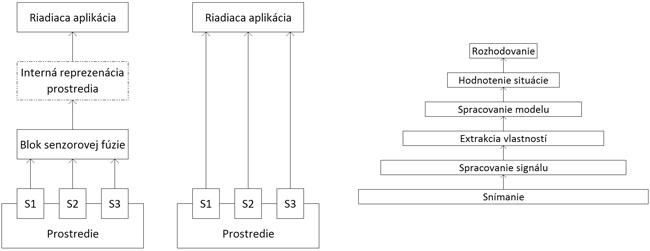
Obr. 2a) Fúzia s multisenzorovou integráciou (vľavo) 2b) vodopádový model fúzie (vpravo)
-
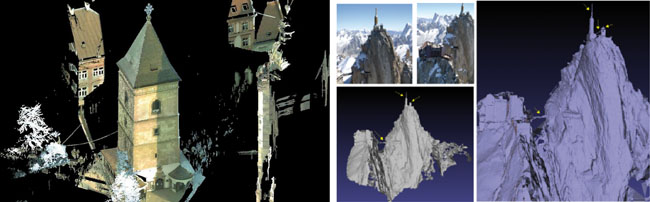
Obr. 3a) 3D model Urbanovej veže (vľavo) b) 3D model pohoria (vpravo).