Začíname s ROS-om (3)
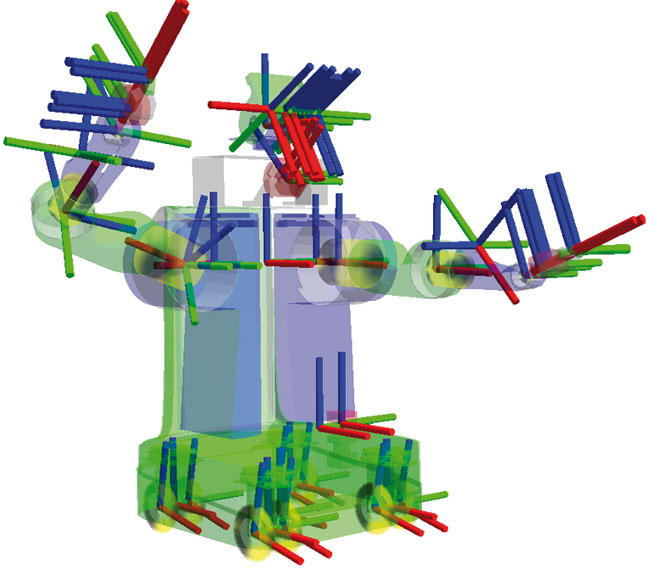
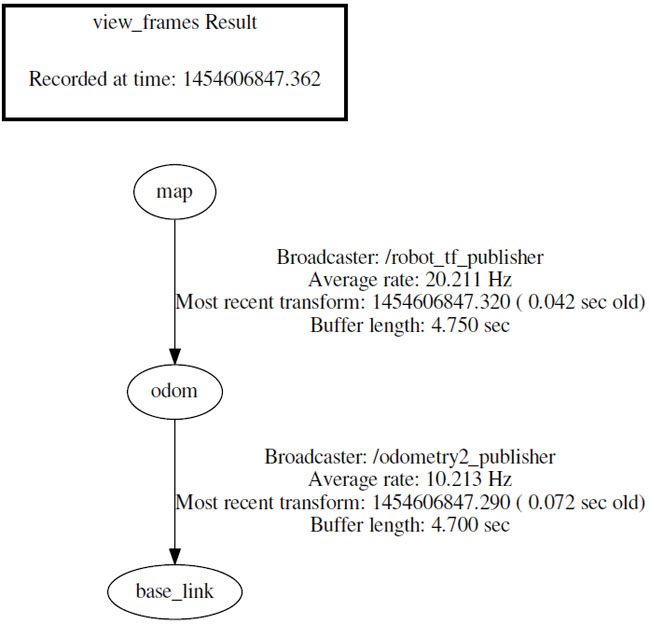
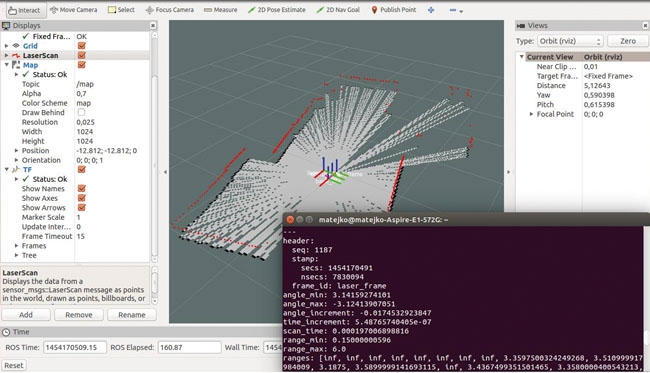
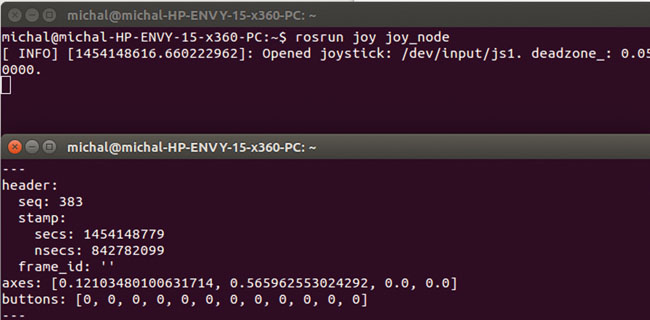
Predchádzajúce dva články sa zaoberali základnými vlastnosťami ROS-u a možnosťami komunikácie medzi uzlami. V týchto článkoch boli uvedené vzorové programy na sériovú komunikáciu a vysvetlili sme fungovanie servisov a tém. Tretia časť je zameraná na balík tf, základné princípy jeho fungovania a využitie. Ďalej uvedieme praktické ukážky aplikácií ROS-u s rôznymi typmi hardvéru a ich zobrazenia v Rvize. Záver tejto časti je zameraný na vhodné typy a triky, ktoré je dobré poznať pri práci s ROS-om.
-

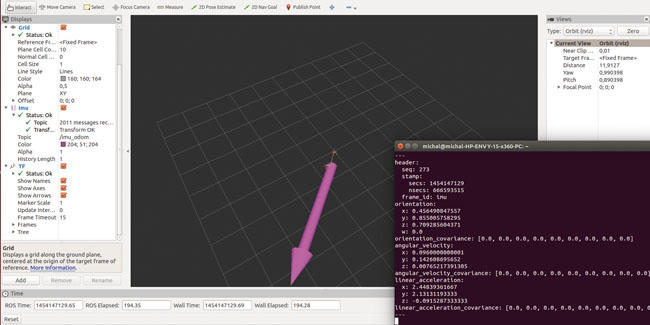
Obr. 20
-

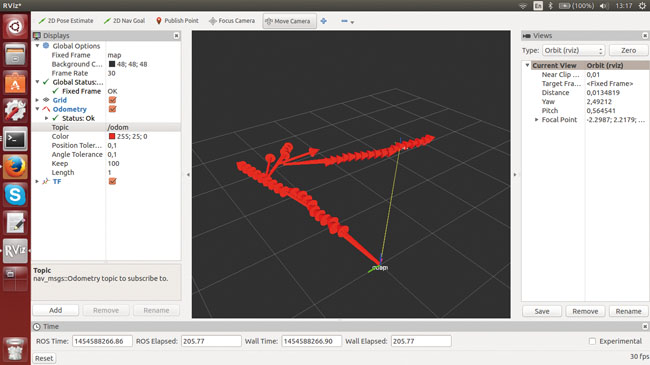
Obr. 21
-

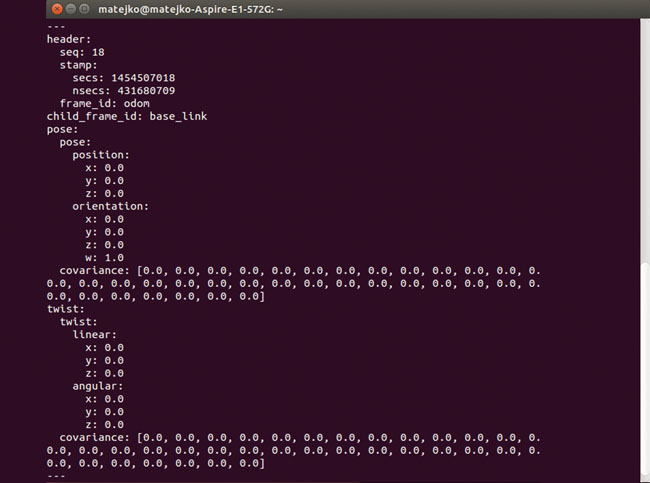
Obr. 22
-
Obr. 23
-

Obr. 24
-
Obr. 25
-

Obr. 26
-
Obr. 27