Začíname s ROS-om (4)
V minulom článku bol opísaný tf balík a práca so senzormi. Táto časť je zameraná na pokračovanie tejto problematiky, pričom jadrom článku sú simulácie, ktoré ROS poskytuje. V priemysle sa totiž veľmi často vyskytujú zložité aplikácie, ktoré by nebolo možné realizovať bez prvotnej simulácie. Pred tým, ako sa začne navrhnutý softvér odlaďovať a testovať na reálnom zariadení, je veľmi vhodné otestovať správanie systému v simulácii. Preto v tejto časti uvedieme základné princípy modelovania a tvorenia simulácií v prostredí RVIZ a ROS Gazebo. Na záver opäť uvedieme typy a triky, ktoré môžu pomôcť pri práci s týmto systémom.
-

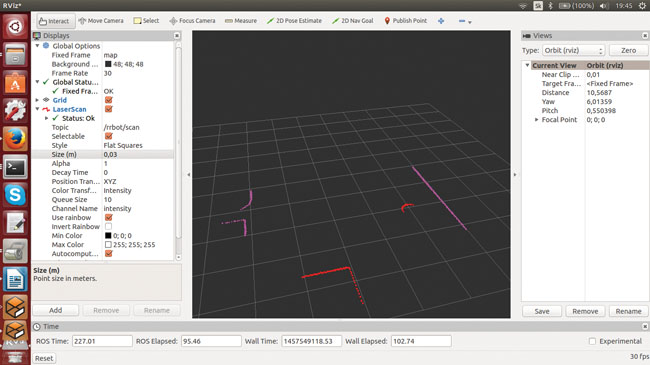
Obr. 28
-

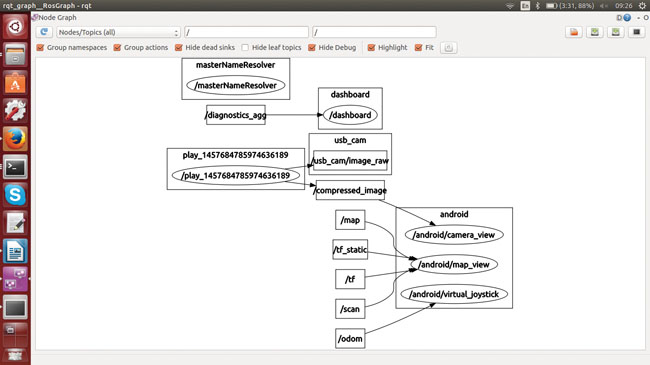
Obr. 29
-

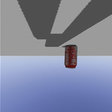
Obr. 30
-

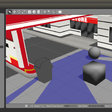
Obr. 31
-

Obr. 32a
-
Obr. 32b
-

Obr. 33
-
Obr. 34
-
Obr. 35
-

Obr. 36