


Pri skúmaní histórie automatizácie a robotiky môžeme zistiť, že v minulosti bola kooperácia človek – robot prísne vylúčená. Dnes je situácia iná. Pokrok automatizačnej techniky a robotiky je priam ohromujúci a aj preto môžeme čoraz častejšie sledovať veľké rozdiely medzi bezpečnostnými štandardmi zavádzanými v minulosti a dnes.
Štandard EN ISO10218 dnes podporuje implementáciu výrobných systémov zameraných na blízku spoluprácu medzi človekom a robotom, čo bolo v minulosti absolútne vylúčené. Uvedená norma uvádza niekoľko povinností, ktoré musia vývojári pri realizácii robotického pracoviska splniť. Zo základných môžeme ako príklad uviesť: ak sa robot podľa uvedenej normy nachádza v režime spolupráce s človekom, musí o tom vizuálne upozorniť svoje okolie.
Ďalšou veľmi rozsiahlou problematikou, ktorou sa norma zaoberá, je bezpečné zastavenie robota. Podľa EN ISO10218 musí robot pracovať za bezpečnostnými závorami či oploteniami alebo môže za určitých podmienok podľa normy pracovať v uvedenom režime kooperácie človek – robot [1, 2].
Výrobné systémy umožňujúce kooperáciu človek – robot môžu ponúknuť množstvo výhod, medzi ktoré patria napríklad: skrátenie výrobného cyklu produktu, odstránenie bezpečnostných oplotení, šetrenie užitočného pracovného priestoru a finančných prostriedkov. Práve vlastnosti, akými sú flexibilita, rekonfigurovateľnosť či bezpečnosť, boli pre výrobcov hlavným podnetom vývoja nových technológií, ktoré by boli schopné požadované vlastnosti dosiahnuť [3].
Priemyselné roboty určené na priamu kooperáciu s človekom
Na rozdiel od typických priemyselných robotov, ktoré pracujú za bezpečnostnými oploteniami, závorami či kamerami, sú kooperujúce roboty (co-workery) určené na prácu s človekom. Ich veľkou výhodou je už spomínaná kooperácia s pracovníkom, pričom robot je schopný v prípade potreby vyhnúť sa nebezpečným zrážkam. V prípade kontaktu s ľuďmi musí vedieť v krátkom čase reagovať, a to minimalizáciou sily a spomalením, resp. úplným zastavením [2].
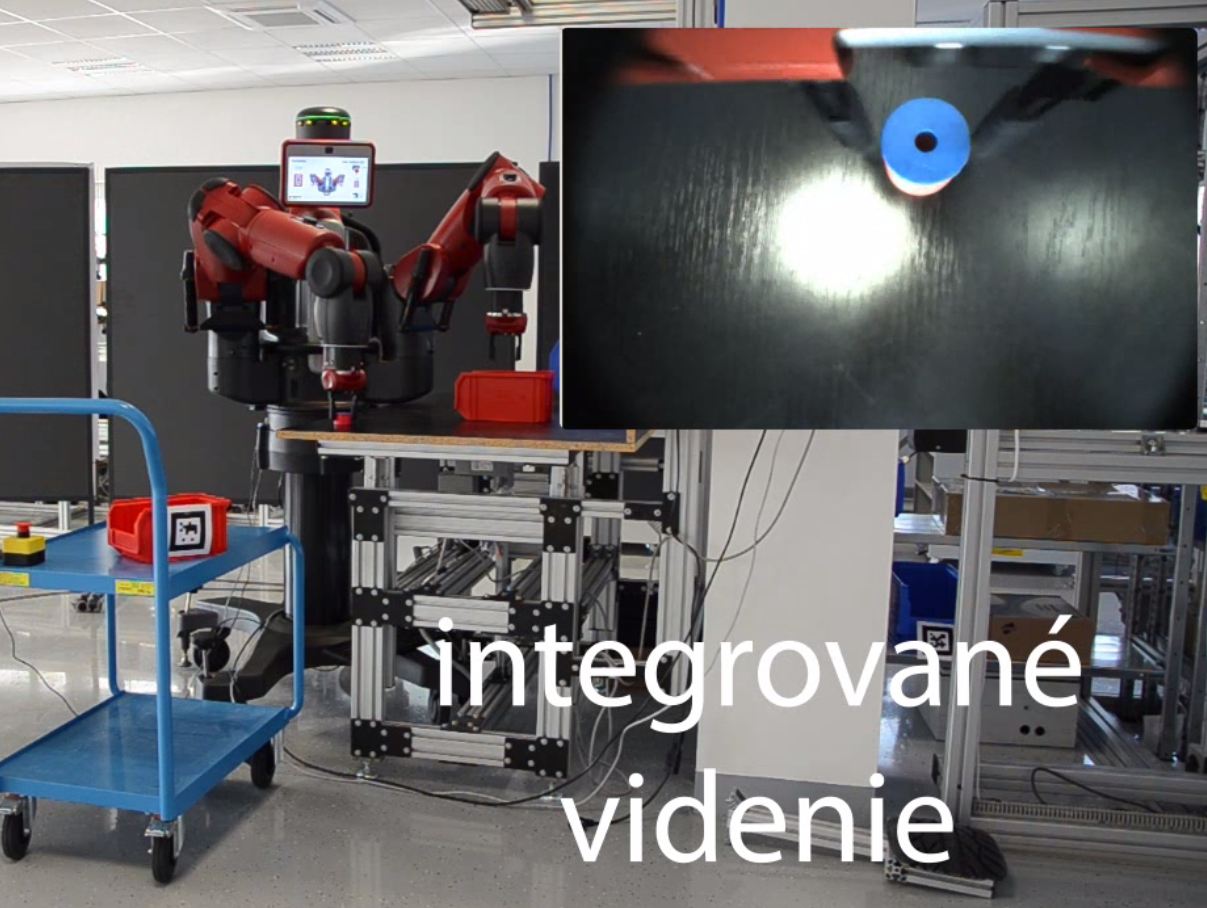
Použite robotického co-workera Baxtra v priestoroch laboratória ZIMS (Žilinské inteligentné výrobné systémy)
Laboratórium ZIMS (spoločné pracovisko Žilinskej univerzity a spoločnosti CEIT, a. s.) disponuje spomínaným kooperujúcim robotom (co-workerom) od spoločnosti Rethink robotics. V ďalšej časti si opíšeme jeho základné bezpečnostné vlastnosti, na ktorých si dokážeme jeho schopnosť pracovať po boku operátorov.
- Softvérová kontrola: Baxter je navrhnutý tak, aby bol v prípade nepredvídaných kolízií spôsobilý spomaliť, prípadne úplne zastaviť.
- Niekoľkonásobné redundantné systémy: kooperujúce roboty obsahujú celý rad inovatívnych senzorov na dosiahnutie čo najvyššej bezpečnosti.
- Ľahkosť: konštrukcia bežných priemyselných robotov je z ťažkých materiálov použitých pre tuhosť a následnú presnosť polohovania, ako aj pre odolnosť v prípade kolízií. Takéto kolízie sú však v prípade robotov určených na spoluprácu s človekom vylúčené a aj preto sú používané materiály mnohokrát ľahšie – napríklad z odolných plastov.
- Dynamické brzdenie: Baxter sa v prípade straty elektrickej energie alebo stlačenia tlačidla núdzového zastavenia plynule a pomaly presunie do svojej východiskovej polohy.
- Na povolenie chodu motorov sa používajú viaceré signály vedené od bezpečnostných snímačov.
- Umiestnený systém na rozpoznávanie osôb v rozsahu 360° dokáže včas reagovať na prítomnosť personálu.
V nasledujúcich odsekoch si uvedieme niekoľko základných technických špecifikácií, ktorými sú co-workery (Baxter) jedinečné na rozdiel od bežne využívaných priemyselných robotov:
- V daných robotoch sa využívajú elastické aktuátory (SEAs – Series Elastic Actuators), keď pružiny vo všetkých kĺboch pomáhajú minimalizovať silu akéhokoľvek kontaktu alebo nárazu. Po náraze, strate kontroly riadenia či vzniku chyby a iných nežiaducich stavoch sa motor deaktivuje.
- Kĺby robota môžu byť kedykoľvek ľahko ovládané rukou operátora, dokonca aj keď je robot mimo prevádzky – bez elektrickej energie.
- Rýchlosť pohybov robota je zvyčajne totožná s rýchlosťou pohybu rúk človeka, čím vie operátor lepšie reagovať na robot a tým minimalizovať zrážky.
Prioritou konštruktérov robotických co-workerov je bezpečnosť človeka. Pri návrhu sa však nesmie zabúdať ani na ochranu samotného majetku zničením. Z tohto dôvodu sú vybavené či už hardvérovými, alebo softvérovými bezpečnostnými funkciami, akými sú napríklad:
- senzor prehrievania, keď sa Baxter pri detekcii zvýšenej teploty dokáže sám vypnúť a zabrániť tak vlastnému poškodeniu,
- po zaregistrovaní stlačenia tlačidla bezpečnostného zastavenia sa zastaví prísun energie do jednotlivých aktuátorov a súčasne sa aktivujú ich brzdy, ktoré zabránia poškodeniu samotného robota.
Vývoj aplikácie robotického co-workera Baxtra v laboratóriu ZIMS
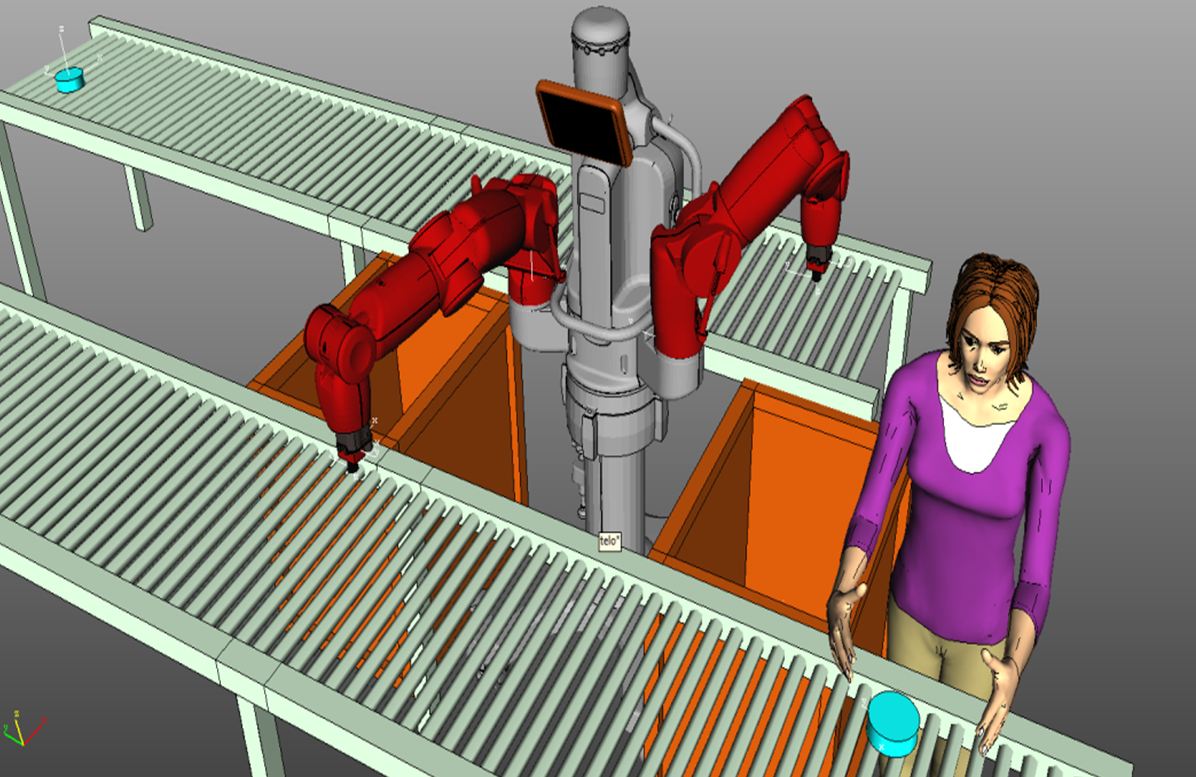
Simulácia robotických výrobných buniek dáva návrhárom a riadiacim pracovníkom možnosť nájsť optimálne riešenie špecifického návrhu a vyhodnotiť ďalšie možné a dostupné alternatívy časovej a priestorovej štruktúry výrobného procesu v rámci robotickej výrobnej bunky. V rámci laboratória využívame Process Simulate (súčasťou PLM Technomatix). Ide o modul, ktorý slúži na tvorbu štúdií vybraných častí výrobného systému a simuláciu výrobných zariadení a procesov vytvorených v module PD. Svojimi nástrojmi umožňuje simulovať materiálové toky a rôzne operácie vykonávané priemyselnými robotmi, ako je bodové a oblúkové zváranie, manipulácia s materiálom, montáž a iné. Z nasimulovaných pohybov vykonávaných robotom možno pomocou postprocesora vytvoriť riadiaci program, ktorý je následne nahraný do robota a pri overovaní simulácie v reálnom prostredí podľa potreby upravovaný. Na obr. 1 môžeme pozorovať simuláciu robotického co-workera Baxtra v aplikácii pick-and-place (uchop a polož).
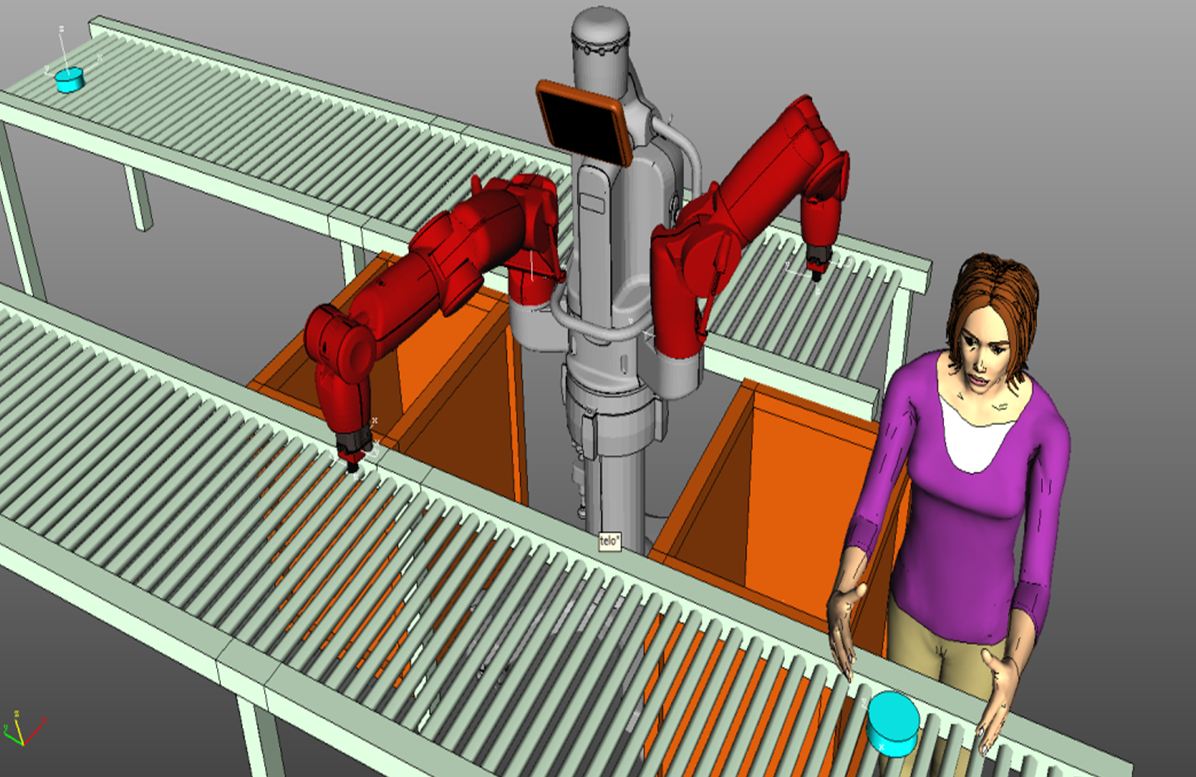
Pri vývoji vlastných robotických aplikácií mnoho softvérových inžinierov využíva softvérové balíky SDK (Software Developers Kit ). Rovnako je to aj pri robote Baxter. Vyvíjané programy určené na riadenie robota sú na ňom následné ladené prostredníctvom jeho operačného systému ROS (Robot Operating System). Robot Baxter tak môže byť reprezentovaný ako master, ku ktorému sa pripájajú jednotlivé vývojové PC stanice s cieľom odladenia vlastných aplikácií (obr. 2).
V samotnom jadre SDK môžeme získať prístup k zdrojovým kódom vyvinutým na prístup, monitorovanie a riadenie všetkých periférií robota (motory, senzory a podobne). Pomocou takejto softvérovej podpory môže vývojár aplikácií v krátkom čase prísť k podstatným základom z oblasti riadenia jednotlivých kĺbov na definovanú pozíciu, riadenia kamery a podobne [4, 5].
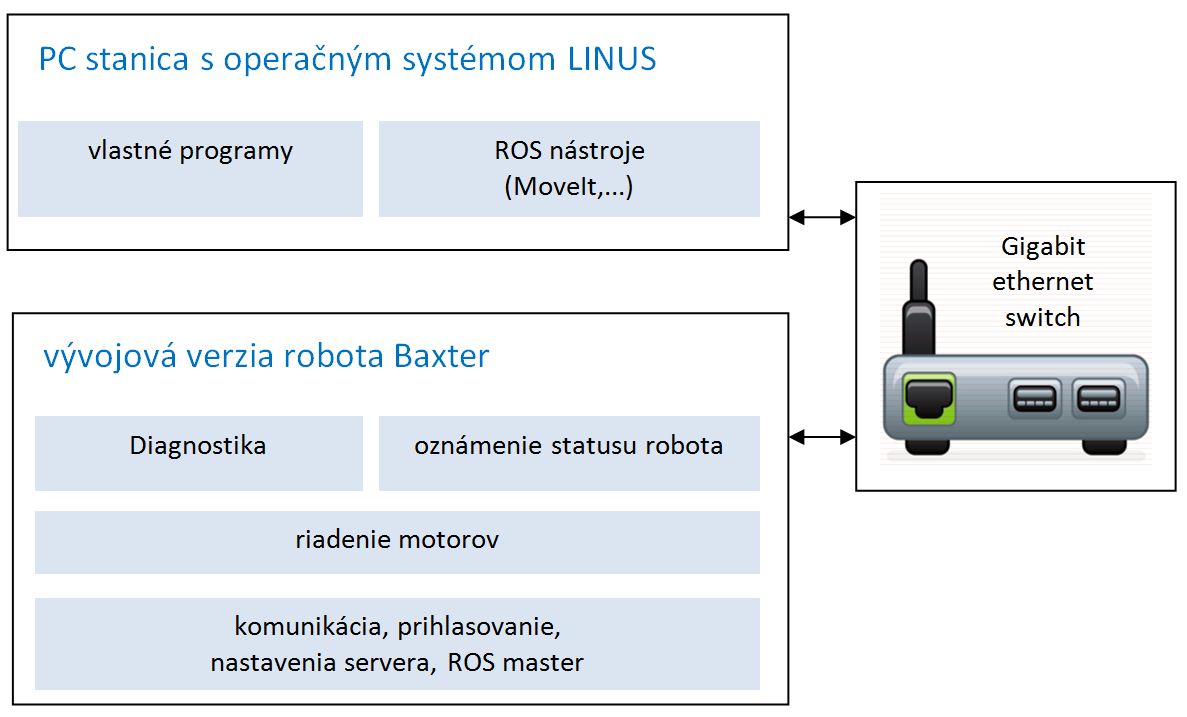
Využívaním a dodržiavaním zásad rozhrania ROS môže byť robot programovaný v rozličných programovacích jazykoch. Ako príklad uvedieme Python či C++ (obr. 3).
Aplikácia pick and place (uchop a polož)
Preklad materiálu z dopravného pása na baliacu linku, zabalených kusov na palety, paletizácia a podobne sú operácie, ktoré sú v priemysle najviac využívané. Všeobecne sa tieto operácie nazývajú pick and place alebo v preklade uchop a polož. Ide o operácie pre operátora jednotvárne, pričom sa často unaví, je nepozorný a následne dochádzka k zvyšovaniu rizika vzniku úrazov. V iných prípadoch ide o prekladanie nadrozmerného tovaru a ťažkých materiálov, keď u ľudí dochádza k zdravotným problémom. Robotické pracoviská sú schopné vykonávať takéto operácie aj niekoľkonásobne rýchlejšie a presnejšie, a preto sa ekonómovia pozerajú na operácie pick and place predovšetkým z pohľadu úspory finančných prostriedkov.
Robot Baxter a mnoho iných priemyselných kooperujúcich robotov je na takéto operácie priam ideálnym riešením, a to predovšetkým z pohľadu priamej kooperácie človeka s takýmto robotom. Na základe uvedených skutočností je aj v laboratóriu ZIMS testovaný robot Baxter na vykonávanie operácie pick and place.
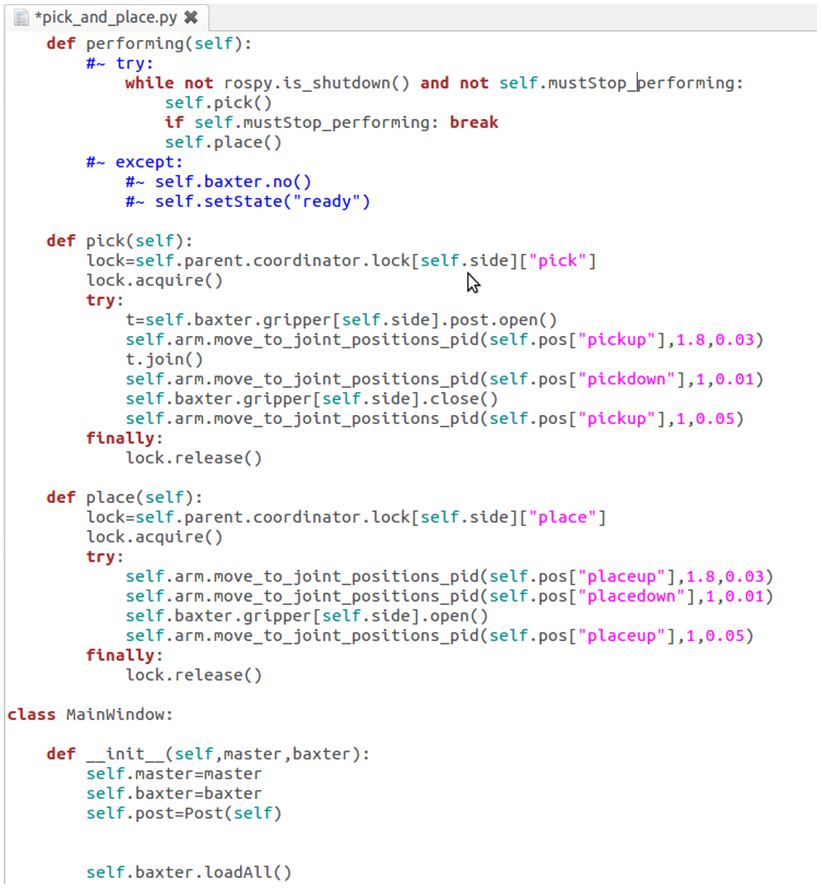
Uvedený robotický co-worker je z pohľadu učenia operátorom veľmi jednoduchý. V základe ide o to, aby sa robot naučil vykonávať pohyby koncového člena (efektora) na pozíciu, odkiaľ má súčiastku vziať a kde ju má položiť. Na displeji môže operátor vidieť výzvu, aby vykonal jednotlivé kroky s cieľom úspešného ukončenia učenia robota. Na obr. 4 môžeme vidieť vykonávanie operácie pick and place robotom Baxter v priestoroch laboratória ZIMS.
Záver
V dnešnej dobe sú spomínané robotické co-workery určené na priamu kooperáciu človek – robot vo výrobných závodoch skôr výnimočnosťou ako samozrejmosťou. Samotná problematika takýchto robotov schopných bezpečne kooperovať s človekom je veľmi rozsiahla. Pri ich návrhu treba dodržiavať bezpečnostné predpisy uvedené v normách a pritom mať na zreteli spoľahlivosť, presnosť, funkcionalitu a podobne. Na roboty takéhoto druhu sa však netreba pozerať ako na nepriateľa, ale ako na pomocníka pri práci operátorov, odbremeňujúceho pracovnú silu výrobných závodov od monotónnych či zdravie ohrozujúcich prác.
Poznámka: Príspevok je súčasťou riešenia grantovej úlohy KEGA 065ŽU-4-2014.
Literatúra
[1] PEDROCHI, N. – VICENTINI, F. – MATTEO, M. – TOSATTI, L. M.: Safe Human-Robot Cooperation in an Industrial Environment. In: International Journal of Advanced Robotic Systems, 2012.
[2] CORRALES, J. A. – GOMEZ, G. J. – TORRES, F. – PERDEREAU, V.: Cooperative Tasks Between Human and Robots in Industrial Environments. In: International Journal of Advanced Robotic Systems, 2012.
[3] KOŠTURIAK, J. – GREGOR, M. – MIČIETA, B. – MATUSZEK, J.: Projektovanie výrobných systémov pre 21. storočie. Žilinská univerzita v Žiline., Žilina 2000. 397 s. ISBN 80-7100-553-3.
[4] Rethink robotics. [online]. Citované január 2015. Dostupné na: <http://rethinkrobotics.com/products/baxter>
[5] Rethink robotics. [online]. Citované január 2015. Dostupné na: <http://github.com/RethinkRobotics/sdk-docs/wiki>
Ing. Peter Marčan
peter.marcan@fstroj.uniza.sk
Ing. Ján Rofár, PhD.
jan.rofar@fstroj.uniza.sk
Prof. Ing. Branislav Mičieta, PhD.
branislav.micieta@fstroj.uniza.sk
Žilinská univerzita v Žiline
Strojnícka fakulta
Katedra priemyselného inžinierstva
Univerzitná 1, 010 26 Žilina
www.priemyselneinzinierstvo.sk