

Standardním prostředkem pro posouzení dynamické stability jsou simulační výpočty časových průběhů na podrobném dynamickém modelu soustavy. Simulují se dynamické chování soustavy při poruchách v síti (změny topologie a zatížení, výpadky zdrojů, zkraty apod.).
Základní podmínkou vyšetřování stability na dynamickém modelu jsou věrohodné modely jednotlivých prvků ES (synchronních strojů, budících a pohonných systémů, případně i nesynchronně připojených zdrojů). Pro tvorbu takových věrohodných modelů je v propojené soustavě nutná spolupráce mezi jednotlivými provozovateli přenosových soustav. Tato součinnost umožňuje vytvářet a zdokonalovat společné modely sítě, určovat meze stability a koordinovat případná nápravná opatření. V rámci ENTSO-E se používá pro výměnu dat standard CGMES (Common Grid Model Exchange Standard – viz [2]), který zahrnuje i dynamické modely pro simulační výpočty dynamické stability. Před použitím dynamických modelů pro simulační výpočty v reálné soustavě je vhodné otestovat dynamické chování modelů v jednoduché síti jako odezvu na specifické poruchy. Za tímto účelem definovala pracovní skupina ENTSO-E „System Protection and Dynamics“ (SPD) metodiku testovaní [3]. V tomto článku je prezentován druhý test, který ukazuje odezvu vybraných (generických) modelů turbín na změnu zatížení v ostrovním režimu (viz také [4] ).
V druhé části článku je popsán vývoj aplikace DSA (z angl. „Dynamic Stability Assessment“) pro posouzení dynamické stability v reálném čase (On-line). Článek je založen na příspěvku [5] z 13. mezinárodní vědecké konference Řízení v energetice (CPS 2018).
Modely turbín
V této části jsou nejprve popsány modely tří nejčastěji používaných turbín (parní, vodní a plynové). Jsou vybrány generické modely podle standardu CGMES a k nim určeny kompatibilní modely dostupné v sítovém simulátoru MODES a jeho dvojčeti DMES, který slouží jako výpočetní jádro v dispečerském tréninkovém simulátoru (podrobněji viz publikace [6] – [8]). Potom je provedeno porovnání dynamického chování jednotlivých modelů turbín a jejich regulátorů při práci generátoru v ostrovním režimu podle metodiky [3], kdy je odebíráný činný výkon (dosahující 80 % ze jmenovité hodnoty činného výkonu generátoru) skokově zvýšen o 5 %.
Modely parní turbíny
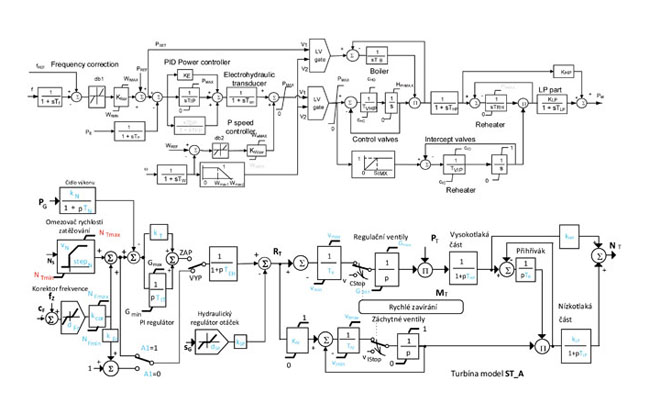
Standard CGMES zahrnuje širokou škálu modelů turbín používaných různými výpočetními programy a síťovými simulátory. Model parní turbíny GovSteamEU ze standardu CGMES (v obr. 1 horní schéma) dovoluje simulovat výkonovou regulaci, která představuje základní režim regulace pro synchronně propojené generátory. Navíc tento režim umožňuje poskytování podpůrných služeb jako primární regulace frekvence f či sekundární regulace frekvence f a činného výkonu P (nebo také z angl. „Load Frequency Control“ – LFC). Zjednodušeně uvažuje i změnu tlaku admisní páry za použití jedné časové konstanty TB.
V dolní části je pro porovnání zobrazen model parní turbíny ST_A implementovaný v simulátoru MODES společně s univerzálním modelem regulátoru turbíny. Proměnná NS umožňuje propojení celého zařízení s dálkově řízenou LFC. Zařízení s názvem korektor frekvence neboli kmitočtový korektor výkonu pak zajišťuje poskytování primární regulace f.
Modely vodní turbíny
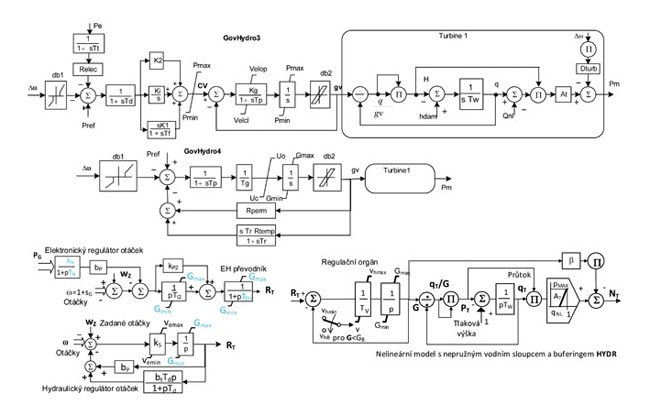
Obr. 2 zobrazuje bloková schémata modelů vodních turbín ze standardu CGMES GovHydro3 (nahoře) a GovHydro4 (uprostřed). GovHydro4 představuje model vodní turbíny s tradičním mechanickohydraulickým regulátorem skládajícím se z rozvodného šoupátka, ze servopohonu a z obvodů dočasné statiky. Model GovHydro3 pak reprezentuje vodní turbínu s elektronickým regulátorem, navíc se zjednodušením původního schématu v takovém smyslu, že uvažuje parametr Rgate s hodnotou 0 (stálá statika zpětné vazby výstupu regulátoru) a Cflag s booleanovskou hodnotou „true“ (PID regulace aktivní). Nelineární závislost mezi polohou regulačního orgánu (např. u Francisovy turbíny se jedná o rozváděcí kolo) GV a výkonem turbíny Pgv může být pro výpočty úhlové a frekvenční stability zanedbána. Proto není tato nelinearita v obou schématech GovHydro3 a GovHydro4 zakomponována.
Kompatibilní model HYDR implementovaný v knihovně síťového simulátoru MODES je zobrazen ve spodní části obr. 2. Spád resp. tlaková výška je uvažována se jmenovitou hodnotou (Hdam = 1). MODES nabízí dva typy modelů regulátorů otáček. Prvním z nich je elektronický regulátor se strukturou odpovídající modelu GovHydro3. Druhým je hydraulický regulátor tentokrát odpovídající modelu GovHydro4.
Modely plynové turbíny
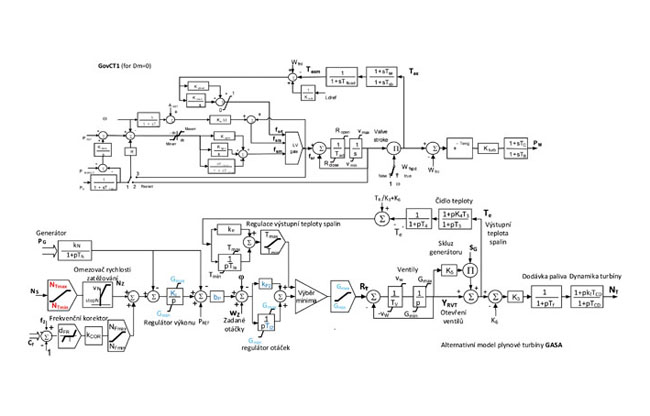
Na obr. 3 je v horní části blokové schéma model plynové turbíny GovCT1 ze standardu CGMES).
Model plynové turbíny GovCT1 je zjednodušen uvažováním parametru Dm = 0 (není uvažována závislost výkonu turbíny PM na otáčkách).
Model má celkem 3 regulační smyčky:
1. smyčku hlavního regulátoru,
2. smyčku regulace teploty spalin a
3. smyčka regulace zrychlení.
Turbína je řízena smyčkou s nejnižší výstupní hodnotou. Hladký přechod mezi výkonovou regulací a regulací teploty spalin je zajištěn integračním členem (parametry Kiload a Kigov). Hlavní regulátor turbíny potom může pracovat v několika režimech v závislosti na poloze přepínače Rselect. Pro polohu 2 a 3 regulátor působí podobně jako regulátor otáček vodní turbíny. Proporcionální (P-regulátor) a astatické řízení rychlosti je dostupné pro polohy 1 a 0. Navíc regulátor dovoluje dálkové řízení výkonu a změnu základního otevření Pref (místně zadaná hodnota) pro úpravu výstupu regulátoru na hodnotu PMWset. Během testů však byla tato funkce blokována (KiMW = 0).
Kompatibilní model GASA z knihovny MODESu je zobrazen ve spodní části obr. 3 GASA odpovídá modelu GovCT1 se zanedbáním bloku dopravního zpoždění Teng (které se u plynových turbín nevyskytuje) a smyčky regulace zrychlení. Regulátor modelu mimo jiné rovněž umožňuje jak proporcionální, tak astatické řízení rychlosti, stejně tak i změnu základního otevření v dálkové regulaci. Změna rychlosti otáčení plynové turbíny závisí stejně jako u vodní turbíny na trvalé statice bP.
Porovnání průběhů otáček při skokové změně zatížení v ostrovním provozu
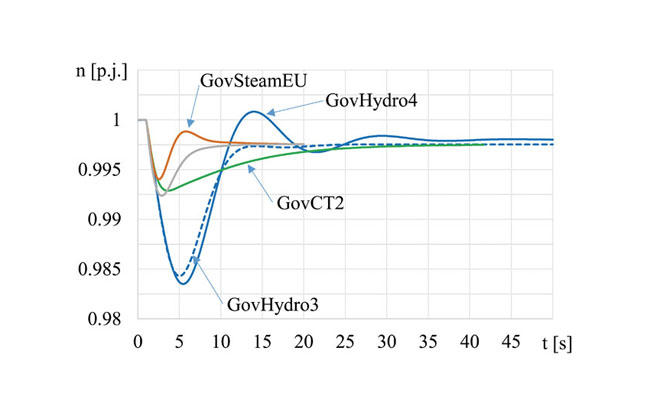
Obr. 4 přehledně v jednom grafu zachycuje průběh otáček všech modelů turbín, který v poměrných jednotkách (p.j.) odpovídá průběhu kruhové rychlosti otáčení ?. Pro výpočet byl použit síťový simulátor MODES.
Z porovnání je patrné, že nejlepšího regulačního procesu je dosaženo u parní turbíny, naopak vodní turbína má odezvu nejpomalejší. Modely GovSteamEU, GovCT2 a GovHydro3, resp. jejich ekvivalenty v MODESu, dosahují ustálené odchylky otáček Δn = -0,0025 p. j. Model GovHydro4 má tuto odchylku mírně nižší, což je způsobeno parametrem zesílení turbíny At a chybějící zpětnou vazbou elektrického výkonu PG v regulátoru. Šedá křivka pak patří modelu turbíny TGOV1 z dokumentu [3]. Změna otáček u parní turbíny závisí na zesílení KCOR korektoru frekvence (jde zároveň o převrácenou hodnotu trvalé statiky primární regulace).
Pomalejší reakce vodní turbíny je způsobena nutným předcházením efektu vodního rázu, který se objevuje při významnějších změnách průtoku v krátkém časovém úseku. Odchylka otáček je tak ze všech modelovaných typů turbín nejvýraznější. V testovaném případě dosahuje maximální odchylka otáček velikosti přes 1,5 % z původní hodnoty, zatímco u parní turbíny se největší pokles pohybuje kolem 0,6 %. Ustálená odchylka otáček vodní turbíny závisí trvalé statice bP.
Odezva plynové turbíny na změnu zatížení je rychlá, nicméně řídicí proces trvá déle než pro případ turbíny parní. Pokles otáček rovněž není tak výrazný jako u vodní turbíny, stále je však větší při porovnání s parní turbínou. Ustálená odchylka otáček je opět dána trvalou statikou bP. Jak již bylo zmíněno, hodnota parametru KiMW byla nastavena na nulu, jinak by dálkové řízení obnovilo původní výstup turbíny a frekvence v ostrově by neustále klesala.
Příspěvek [5] obsahují detailnější průběhy výkonu generátoru, turbíny a přehled použitých parametrů pro jednotlivé generické modely turbín.
Aplikace DSA pro posouzení dynamické stability v reálném čase
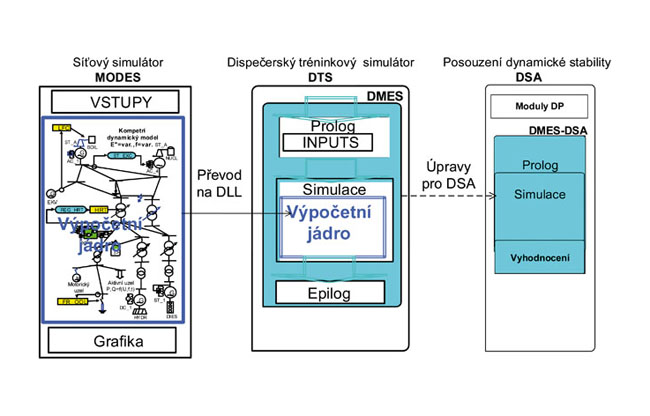
V druhé část článku je popsán vývoj aplikace pro posouzení dynamické stability. Jak již bylo řečeno v úvodu, provádí se tradičně posouzení dynamické stability pomocí studií na historických nebo rozvojových datech. V současné době (charakterizované vysokou proměnlivostí toků výkonů) však už tento přístup není adekvátní a často je i prakticky nemožné predikovat všechny možné stavy soustavy. Proto jsou vyvíjeny aplikace, schopné posoudit dynamickou stabilitu jednak velmi rychle a jednak pro aktuální stav soustavy (neboli on-line). Klíčovou součástí takových aplikací je výpočetní jádro, které je schopno počítat dynamiku soustavy dostatečně rychle a zároveň věrohodně (odezvy soustavy na vybrané poruchy sítě musí být realistické). Oba požadavky splňuje výpočetní jádro DMES používané v dispečerském tréninkovém simulátoru DTS, který je využíván pro výcvik dispečerů v ČR. Využití DMES je tudíž logickým vyústěním vývoje tohoto simulačního jádra, jak symbolicky ukazuje obr. 5.
Výpočetní jádro ze síťového simulátoru MODES bylo převedeno do formy dynamicky linkované knihovny a využito (po doplnění dalších vstupních bodů Prolog a Epilog) v DTS (podrobněji viz příspěvky [6] a [7]). Další využití jádra DMES pro aplikaci DSA je v pravé části obrázku.
Plánované využití aplikace DSA předpokládá tři režimy. V základním režimu on-line bude aplikace spouštěna periodicky na aktuálním snímku sledované soustavy (případně rozšířeném o predikční model synchronní zóny kontinentální Evropy). Režim je určen primárně pro dispečerské řízení. V off-line režimu budou vstupní data tvořit predikční modely IDCF a DACF („Intra Day Congestion Forecast“ a „Day Ahead Congestion Forecast“). Tento režim bude určen pro krátkodobou přípravu provozu. Poslední studijní režim umožní načítat historické snímky sledované soustavy (zahrnuje nejen řízenou soustavu, ale i okolní sítě provozovatelů přenosových soustav monitorované ze systému SCADA – „Supervisory Control And Data Acquisition“). Režim slouží pro „post mortem“ analýzu událostí (z hlediska dynamického chování soustavy) a verifikaci dynamických modelů (například porovnáním s WAMS („Wide Area Monitoring System“)).
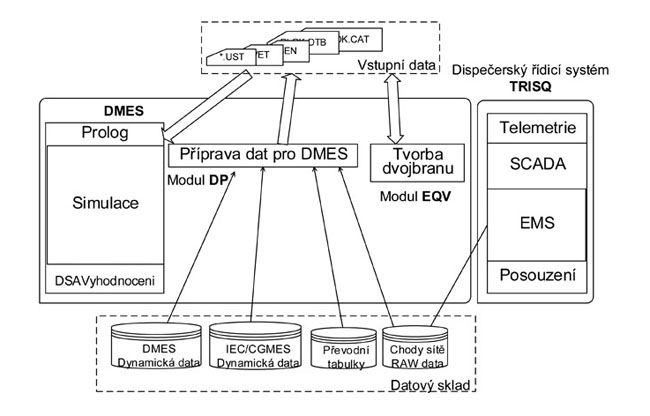
Pro testování a porovnání různých metod posouzení dynamické stability byla vyvinuta pilotní aplikace DSA. Obr. 6 ukazuje základní koncepci pilotní aplikace DSA včetně vazby na řídicí systém TRISQ i na zdroje vstupních dat.
Kromě již zmíněného výpočetního jádra DMES obsahuje pilotní aplikace dva další moduly. Úkolem modulu DP je převedení dat ze skladu do proprietárních formátů DMES/MODES. Přitom se předpokládá, že dynamická data budou kompatibilní se standardem CGMES. Výchozí statická data chodu sítě jsou exportována řídicím systémem TRISQ jako snímky sledované soustavy každých 5 minut. Je tedy možno analyzovat jak aktuální stav soustavy daný posledním snímkem, tak i historicky uložená data. Modul EQV jednak definuje poruchy ohrožující úhlovou stabilitu synchronních generátorů (trojfázové zkraty na vedeních, případně i jiné poruchy definované v uživatelském seznamu), vygeneruje pro ně zjednodušené modely a připraví data pro jednotlivé výpočtové případy. Simulační jádro DMES pak postupně vypočítá hodnoty mezní doby trvání zkratu pro tyto případy. Kritériem posouzení úhlové stability je, že spočtená mezní doba musí být větší, než je doba vypnutí poruchy ochranami (obvykle do 100 ms). Celý simulační výpočet proběhne automaticky bez nutnosti zásahu obsluhy.
Závěr
Článek ukazuje generické modely turbíny vhodné pro výpočty elektromechanických přechodných dějů. Generické modely pocházejí ze standardu CGMES (používaného pro výměnu dat v rámci sdružení ENTSO-E) a mají odpovídajícími alternativy implementované v síťovém simulátoru MODES (a odvozeném výpočtovém jádru DMES). Tyto modely byly podrobeny jednoduchému testu pro zjištění dynamické odezvy při skokové změně zatížení v ostrovním provozu.
Elektrizační soustava prochází v současné době významnou transformací (rozšiřování decentralizovaných a obnovitelných zdrojů energie, otevírání trhu s elektřinou spojené s přenosy výkonu na velkou vzdálenost apod.). Přenosová soustava jako součást ES začíná být provozována blíže k jejím limitům stability. Proto vzrůstá potřeba provádět pravidelně off-line studie dynamické stability a v budoucnu se dokonce počítá i s posuzováním dynamické stability on-line v rámci dispečerských řídicích systémů. V druhé část článku je ukázán vývoj takové on-line aplikace DSA, která využívá dynamického modelu elektrizační soustavy DMES. Toto výpočetní jádro osvědčené z dispečerského tréninkového simulátoru DTS, který je využíván pro výcvik dispečerů, dává předpoklady úspěšné implementace pro DSA.
Literatura
[1] Nařízení komise (EU) 2017/1485 ze dne 2. srpna 2017, kterým se stanoví rámcový pokyn pro provoz elektroenergetických přenosových soustav, https://publications.europa.eu/en/publication-detail/-/publication/d09a428c-8957-11e7-b5c6-01aa75ed71a1/language-cs
[2] Detail description of the CGMES profiles, Ver. 2.4.14, 4/2014
[3] Documentation on controller tests in test grid configurations, ENTSO-E SG SPD Report 2013, https://www.entsoe.eu/fileadmin/user_upload/_library/publications/entsoe/RG_SOC_CE/131127_Controller_Test_Report.pdf
[4] K. Máslo, M. Kolcun, „Load-frequency control management in island operation,“ Electric Power Systems Research, 2014, vol. 114, p. 10-20
[5] K. Máslo, M. Chladová, „Turbine models for on-line dynamic stability assessment, in Proc. 13th International Scientific Conference Control of Power Systems (CPS),“ June 2018 Tatranské Matliare
[6] K. Máslo and M. Kolcun, „Simulation engine for dispatcher training and engineering netw andork simulators,“ in Proc. IFAC CIGRE/CIRED Workshop on Control of Transmission and Distribution Smart Grids CTDSG, 2016, https://www.sciencedirect.com/science/article/pii/S240589631632300X
[7] K. Máslo, „Power system dynamics modeling,“ in Proc. 10th International Scientific Conference Control of Power Systems, CPS 2012
[8] K. Máslo, „Frequency stability in the context of the European network codes,“ in Proc. 9th International Scientific Symposium on Electrical Power Engineering ELEKTROENERGETIKA, 2017, pp. 436-442
doc. Ing. Karel Máslo, CSc.
Ing. Miloslava Chladová, CSc.
ČEPS, a.s.
