


Inteligentný priestor a možnosti využitia UI
V [2] bol priblížený koncept internetu vecí (IoT) a jeho základné aplikačné domény. Jemu veľmi podobným konceptom, avšak s istými špecifikami, je práve IP [3], ktorý je vhodný hlavne pre indoorové aplikácie. Vo všeobecnosti IP predstavuje jednu alebo viacero miestností, ktoré sú vybavené senzormi a ďalšími zariadeniami umožňujúcimi snímať signály a rozpoznávať vzniknuté udalosti. Takúto informáciu ďalej využívajú ľudia alebo zariadenia nachádzajúce sa v IP, takže skoro všetky aktivity sú obmedzené len na IP. Dokonca použitie internetu nie je vždy nutné, nakoľko sa často využívajú rôzne iné komunikačné technológie. Z tohto uhla pohľadu možno IP vnímať ako pomerne uzatvorený systém, aj keď isté informačné toky z okolia sú možné.
Pôvodne sa aplikácie IP obmedzovali iba na tzv. chytré podlahy, ktoré boli vybavené napr. RFID, tlakovými a ďalšími snímačmi slúžiacimi na identifikáciu a lokalizáciu zariadení. IP predstavuje rozšírenie týchto podláh na celý priestor a sníma rôzne ďalšie veličiny a aktivity, napr. teplotu, únik plynov, či dokonca môže rozpoznávať rôzne podozrivé formy správania sa zariadení a ľudí.
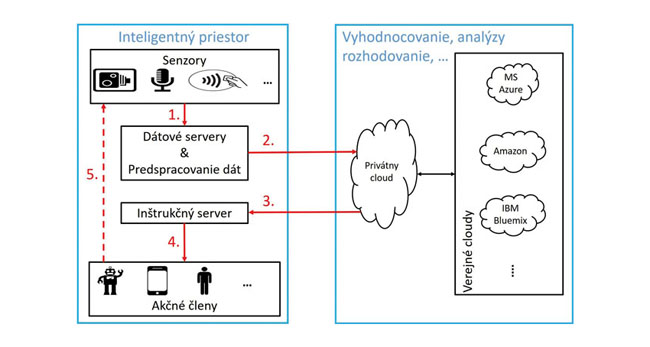
Aj v prípade IP existuje vývojový medzistupeň v podobe tzv. chytrých priestorov, ktoré v podstate len zbierajú dáta zo snímačov a nanajvýš vyhodnocujú niektoré základné funkcie, napr. vznik kolíznych situácií (požiar, strata kontaktu so sledovaným objektom a pod.). Skutočný IP je rozšírením predošlého konceptu o sofistikovanejšie funkcie, kde sa vyžaduje podpora rozhodovania aj s použitím prostriedkov UI využívajúcich tzv. reakčnú slučku (obr. 1).
Reakčná slučka sa dá charakterizovať podľa dátových a informačných tokov, ktoré v nej prebiehajú. Tie sa začínajú pri senzoroch, ako sú napr. kamery, RFID štítky, mikrofóny. Najsamprv posielajú svoje dáta do dátových serverov (krok 1), ktoré sú z dôvodu šetrenia prenosových liniek fyzicky umiestnené v ich čo najtesnejšej blízkosti. Napr. v IP opísanom v [3] sa využívajú okrem iného aj hĺbkové skenery (zariadenia Kinect od MS), ktoré sú napojené na mini PC s cieľom spracovania rozsiahlych 3D matíc obrazových pixelov. Po spracovaní takýchto surových dát filtrovaním, kompresiou, extrakciou trendov, výberom iba dôležitých častí a pod. sa posielajú na privátny cloud s možnosťou prepojenia aj na verejný cloud (krok 2), kde sa vykonáva ich hĺbková analýza, vyhodnocovanie a napokon rozhodovanie, ktorého výstupy v podobe riadiacich inštrukcií pre akčné členy a odporúčaní pre ľudí sa naspäť posielajú do inštrukčného servera IP (krok 3). Následne sú distribuované do jednotlivých uzlov IP (krok 4). Takýmto spôsobom je reakčná slučka uzavretá a krok 5 predstavuje zmenu situácie v IP v dôsledku vykonaných akčných zásahov a v ďalšom kroku sa celý tento cyklus znovu opakuje.
Okrem iného si tu môžeme všimnúť ďalší rozlišovací prvok medzi chytrým priestorom a IP, a to že IP má svoj vlastný back-end, ktorý umožňuje informačný tok nielen jedným smerom od snímačov, ale aj spätne od rozhodovacieho centra vo forme inštrukcií k akčným členom. Zároveň takáto schéma ukazuje na inú odlišnosť medzi IP a IoT, a to že IP je konceptom so značnou mierou centralizácie oproti IoT. Napriek tomu IP umožňuje aj veľkú mieru distribúcie výpočtov. V podstate ide o zmiešanú architektúru, kde sa najmä v oblasti senzorov a predspracovania dát (pred krokom 2) v plnej miere uplatňuje počítanie na hrane. Dáta sa hneď na mieste spracúvajú vo forme bezprostredne priradenej výpočtovej sily v podobe mini PC, jednodoskových počítačov, napr. Raspberry Pi, alebo v podobe serverov nachádzajúcich sa v tesnej blízkosti IP. Dokonca nie je ani nutné vždy využívať cloudové riešenia, ale najmä v jednoduchších návrhoch stačí dostatočne výkonný centrálny výpočtový server. Avšak na druhej strane možno s výhodou využiť veľkú výpočtovú silu cloudov pri tvorbe rôznych modelov (riadiace, predikčné, behaviorálne atď.) a nastavovaní ich parametrov pomocou takých prostriedkov UI, ako sú neurónové siete a evolučné algoritmy, ktoré sa v rámci kroku 3 reakčnej slučky už ako hotové riešenia nahrajú do jednotlivých zariadení. Centralizácia v rámci IP umožňuje, aby dáta boli v kompaktnejšej forme, ktorá pomáha pri komunikácii medzi rôznymi zariadeniami, a tak uľahčuje rôzne multiagentové aplikácie. Obzvlášť výhodným sa použitie IP javí v robotike, kde roboty nemusia niesť všetku senzoriku, čím sú lacnejšie a jednoduchšie a dokážu omnoho ľahšie kooperovať s inými typmi robotov, dokonca vidia „za roh“, čiže majú prístup k dátam z takých senzorov, ktoré by nemali ani pri svojom plnom vybavení.
Takto prezentovaný IP umožňuje riešenie celého radu úloh, ktoré predpokladajú aj využitie prostriedkov UI. V prípade mobilnej robotiky ide okrem iného o identifikáciu, lokalizáciu a následné plánovanie cesty. Práve mnohé algoritmy plánovania cesty sú založené na rôznych princípoch výpočtovej inteligencie. Základný prehľad týchto metód možno nájsť napr. v [4]. Prostriedky UI sa využívajú pri spracovaní zašumených dát, t. j. vhodné použitie fuzzy systémov. Pri predikcii, ak sa napr. dočasne stratí signál, možno s výhodou využiť neurónové siete. Ako ďalší príklad využitia UI môžu slúžiť tzv. fuzzy kognitívne mapy (rozšírenie jednoduchých fuzzy pravidlových systémov) pri kombinácii dát z viacerých senzorov na navigáciu robotov [5]. Podrobnejší opis niektorých prípadových úloh využívajúcich IP možno nájsť napr. v [6].
Všadeprítomná robotika v inteligentnom priestore
S rozvojom IoT a predovšetkým IP vzniká možnosť plného uplatnenia ďalšieho konceptu, ktorý by sme mohli preložiť ako všadeprítomná (ubiquitous) robotika (VR) [7]. Rôzne zariadenia spolupracujú s cieľom pomáhať ľuďom pri vykonávaní ich úloh a aktivít s využitím informácií a inteligencie zabudovaných v rámci siete týchto zariadení. VR sa teda opiera u údaje získané z rôznych snímačov rozptýlených v priestore. Keďže môže ísť o spracovanie veľkého množstva údajov zo zariadení, medzi ktorými môžu jestvovať zložité vzťahy, vznikajú aj vysoké nároky na výpočtový výkon, čo môže byť zase problém pre samotný robot. Riešením je preto distribuovať aj časť výpočtov na jednotlivé prvky siete [8]. Takto sa aj v tomto prípade dostávame k potrebe počítania na hrane.
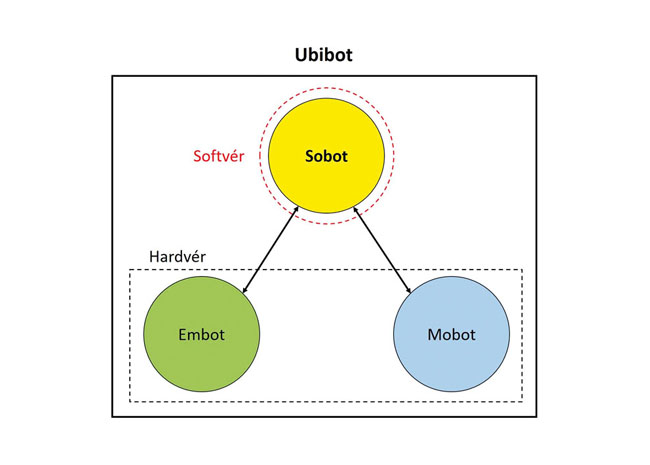
Kľúčovým prvkom VR je tzv. Ubibot, čiže všadeprítomný robot. Ten sa skladá z troch hlavných častí [7]:
- virtuálny softvérový robot, tzv. Sobot alebo Avatar,
- integrovaný (embedded) senzorický systém, tzv. Embot,
- reálny mobilný robot, tzv. Mobot.
Sobot je vlastne simulačným softvérom, ktorý slúži na simulovanie správania prvkov daného priestoru, kde sa robot nachádza. Pomocou neho možno riešiť rôzne alternatívne situácie, prekračovať rozličné fyzikálne obmedzenia týkajúce sa napr. priestoru a času. V rámci tohto simulátora sa vykonávajú také činnosti, ako samoučenie, automatické rozhodovanie či predikcia, čo sú typické aplikačné úlohy pre UI. Embot nie je v našom chápaní nič iné ako IP, čiže priestor snímačov zapojených do siete, kde sa údaje nielen snímajú, ale aj spracúvajú. Typickými aktivitami sú tu napr. lokalizácia objektov, opísanie vzniknutej situácie či extrakcia potrebných dát a informácií. Aj v tejto oblasti sa uplatňujú prostriedky UI, ako to bolo opísané v predošlej časti tohto seriálu [1]. Vzťahy medzi časťami takéhoto všadeprítomného robota Ubibot možno vidieť na obr. 2, kde je väzba medzi Embotom a Sobotom analogická reakčnej slučke (obr. 1), zatiaľ čo medzi Sobotom a Mobotom prebieha výmena inštrukcií pre Mobot a údajov o jeho stave pre potreby Sobota. Ako príklad použitia konceptu Ubibota pre potreby navigácie možno spomenúť prácu [9].
Záver
Cieľom tohto článku bolo poukázať na potenciál využitia prostriedkov UI v sieťach s výpočtami na hrane s dôrazom na ich prepojenie s robotmi. Práve prepojenie senzorických sietí, ktoré sú často inštalované aj z rôznych ďalších dôvodov, s robotmi prináša veľké technické aj ekonomické výhody v podobe lacných a jednoduchých robotických návrhov, keďže senzorika v súčasnosti predstavuje značný podiel na cene mobilného robota. Myšlienka všadeprítomného robota umožňuje nielen priamo využiť prostriedky IP, ale vďaka simulačným, predikčným a rozhodovacím schopnostiam takéhoto robota mu poskytuje možnosť riešiť veľmi zložité problémy, ktoré sú typické pre úlohy kooperatívnej robotiky. Uvedené schopnosti takéhoto robota dokážu vo veľkej miere zabezpečiť práve prostriedky UI.
Poďakovanie
Publikácia vznikla vďaka projektu VEGA 1/0663/17 Inteligentné kyberfyzikálne systémy v heterogénnom prostredí s podporou IoE a cloudových služieb.
Referencie
[1] Vaščák, J. – Čupková, D. – Zolotová, I.: Smart/Intelligent Edge – umelá inteligencia v dynamických sieťových architektúrach. In: ATP Journal, 2019, roč. 26, č. 1, s. 38 – 39.
[2] Mocnej, J. – Kajáti, E. – Papcun, P. – Zolotová, I.: Smart/Intelligent Edge – sieťové charakteristiky a aplikačné domény v IoT. In: ATP Journal, 2018, roč. 25, č. 9, s. 42 – 44.
[3] Puheim, M. – Hvizdoš, J. – Szabóová, M. – Vaščák, J.: Inteligentný priestor v Centre inteligentných technológií – návrh systému. In: ATP Journal, 2017, roč. 24, č. 8, s. 36 – 39.
[4] LaValle, S. M.: Planning Algorithms. Cambridge University Press, 2006.
[5] Vaščák, J. – Hvizdoš, J.: Vehicle Navigation by Fuzzy Cognitive Maps Using Sonar and RFID Technologies. In: 14th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herľany, Slovensko, 2016, s. 75 – 80.
[6] Vaščák, J. – Kajáti, E. – Zolotová, I.: Concept of Intelligent Space in Education of IoT Applications in Robotics. In: 16th International Conference on Emerging eLearning Technologies and Applications (ICETA), 2018, s. 629 – 634.
[7] Kim, J. – Zaheer, S.A. – Ryu, S.: Intelligence Technology for Ubiquitous Robots. In: Intelligent Assistive Robots: Recent Advances in Assistive Robotics for Everyday Activities, Springer, 2015, diel 106, s. 275 – 295.
[8] Miškuf, M. – Kajáti, E. – Mocnej, J. – Papcun, P.: Smart/Intelligent Edge – Princípy spracovania dát na hrane siete. In: ATP Journal, 2018, roč. 25, č. 7, s. 50 – 51.
[9] Vaščák, J.: Navigation Based on Fuzzy Cognitive Maps for Needs of Ubiquitous Robotics. In: 17th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herľany, Slovensko, 2019.
doc. Dr. Ing. Ján Vaščák
Ing. Dominika Čupková
prof. Ing. Iveta Zolotová, CSc.
Technická univerzita v Košiciach FEI
Katedra kybernetiky a umelej inteligencie
Laboratórium inteligentných kybernetických systémov/Laboratórium IoT
http://ics.fei.tuke.sk