


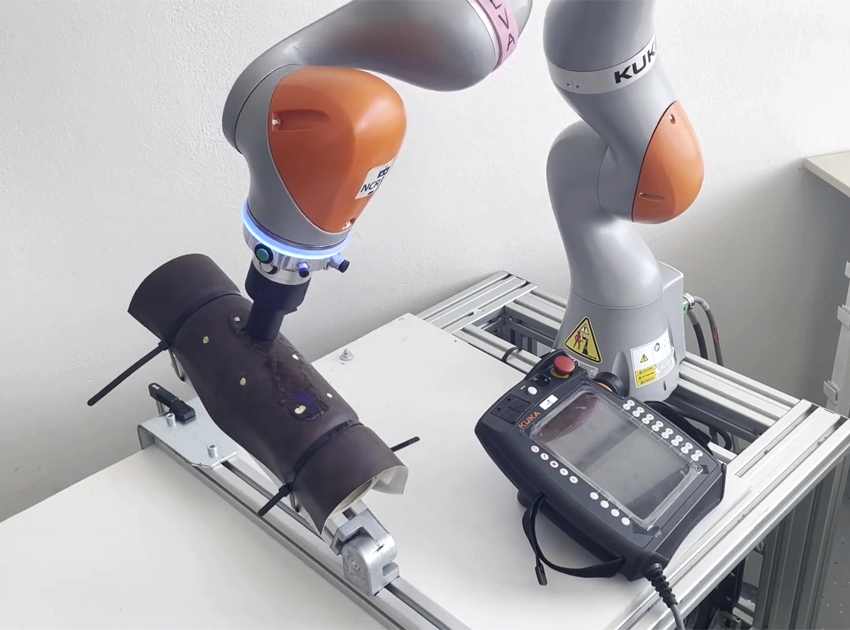

„Bakalárska práca by nemala byť len výtvorom, ktorý skončí zabudnutý niekde v šuflíku, a preto ma táto téma zaujala hlavne svojou myšlienkou a potenciálom možnej implementácie v praxi,“ hovorí autorka návrhu Bc. Izabela Trepáčová z Ústavu robotiky a kybernetiky FEI STU v Bratislave. Ide o ultrazvukovú terapiu mäkkého kolenného tkaniva s využitím silovo poddajného robota KUKA LBR iiwa.
Tradičnú ultrazvukovú terapiu, ktorá má blahodarné účinky napríklad pri regenerácii poškodených tkanív, vykonáva v bežne vybavenej ambulancii manuláne terapeutický personál. Vo väčšine prípadov je to monotónny, zdĺhavý a viacnásobne opakovaný úkon. Vďaka pohybu ultrazvukovej hlavice umiestnenej na silovo poddajnom robote by sa mohol proces zefektívniť, zdravotnícky personál by bol odbremenený a mohol by sa tak sústrediť na iné dôležité úkony, kde je ľudský faktor nevyhnutný. Cieľom našej práce bolo preto navrhnúť a zrealizovať robotickú kolaboratívnu aplikáciu práve na tento účel.
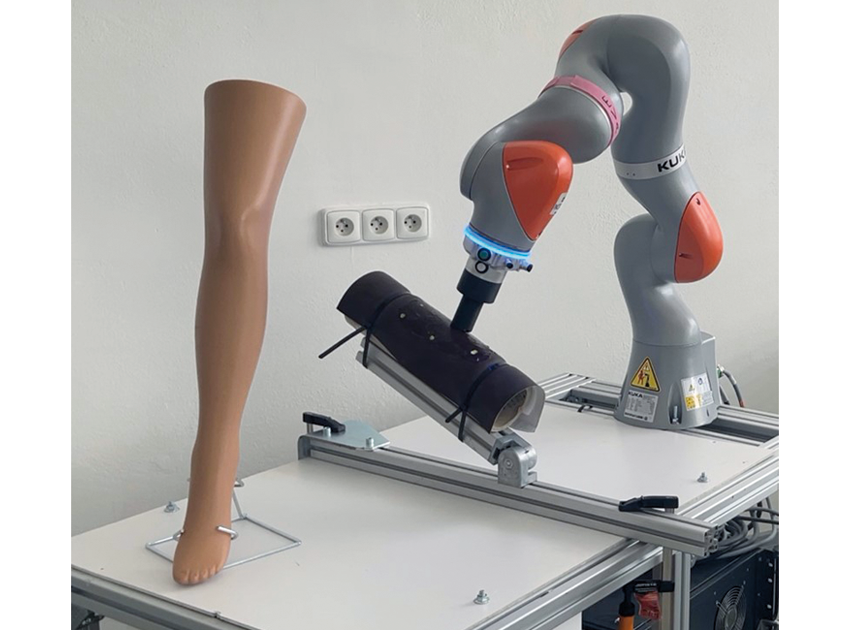
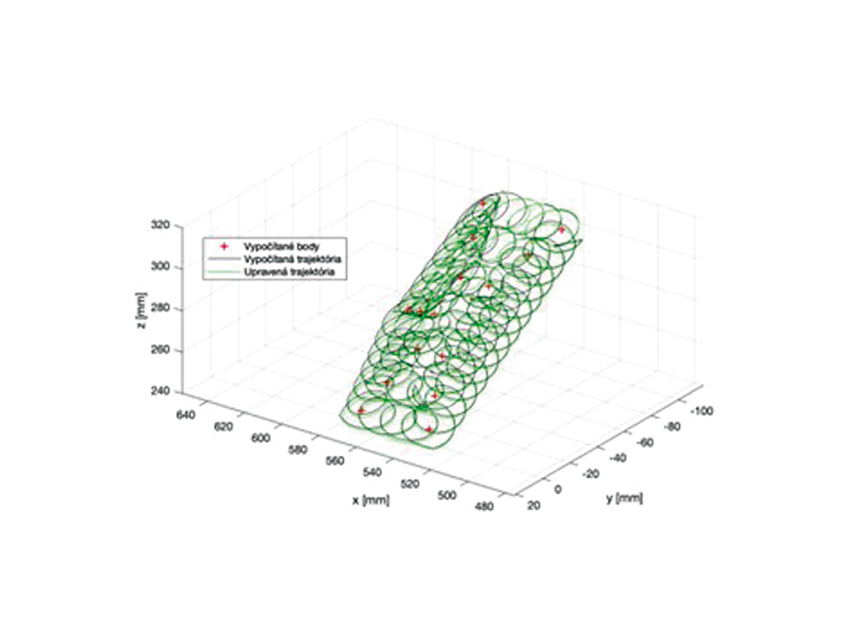
V rámci kolaboratívnej aplikácie terapeut na začiatku len prostredníctvom ultrazvukovej hlavice pripojenej na prírube robota, pomocou používateľského tlačidla a ovládacieho panelu zadáva ľubovoľné body na dolnej končatine. Tie podľa zvoleného programu buď ohraničujú oblasť ošetrenia, alebo definujú trasu trajektórie ultrazvukovej hlavice. Na základe týchto bodov sa pomocou matematických princípov v algoritme vygeneruje vhodná trajektória, po ktorej sa má plocha ultrazvukovej hlavice pohybovať.
Pri tvorbe algoritmu bolo potrebné dodržať, aby trajektória mala krúživý charakter na základe analýzy pohybu ultrazvukovej hlavice počas klasickej terapie. Do úvahy sa berie aj výpočet sklonu nástroja v jednotlivých bodoch trajektórie. Dôležité je, aby bola počas terapie obsiahnutá celá vyznačená oblasť a pohyb ultrazvukovej hlavice kopíroval povrch končatiny. Kvôli možným nepresnostiam vo výpočte vopred vygenerovanej trajektórie bola preto do riešenia pridaná aj online úprava trajektórie počas terapie prostredníctvom merania a vyhodnocovania vplyvu externej sily na plochu ultrazvukovej hlavice.
Využili sme pri tom silovo poddajnú vlastnosť robota a jeho schopnosť merať pôsobenie externej sily. Pokiaľ bola zaznamenaná veľká externá sila, prítlak ultrazvukovej hlavice na pokožku sa znížil a naopak. Tak sme zabezpečili, aby mala plocha hlavice stály kontakt s povrchom končatiny a aby mal pohyb hladký charakter.
Pred začatím terapie personál len zadá čas trvania, zapne ultrazvukový prístroj a spustí proces terapie. Následne robot sám začne vykonávať žiadaný pohyb podľa zadania času. Celá robotická aplikácia je veľmi intuitívna na ovládanie a minimalizuje úkon terapeuta na minimum.
„Obmedzenia robotickej aplikácie vidím hlavne v prvotných finančných nákladoch na zakúpenie silovo poddajného robota. Keďže robot je multifunkčný a použiteľný na zdravotníckom pracovisku na viacero účelov pri zmene bežiaceho programu, prvotná investícia sa rýchlo vráti,“ vysvetľuje I. Trepáčová.
V rámci tvorby riešenia sa v odbornom laboratóriu vykonalo niekoľko meraní zameraných na vyhodnocovanie externej sily a funkčnosť navrhnutej kolaboratívnej aplikácie. Merania sa realizovali na makete dolnej končatiny, ktorá bola vytvorená s cieľom simulovať charakter pokožky dolnej končatiny. Riešenie zatiaľ nebolo otestované na reálnych pacientoch.
„Naším cieľom je v budúcnosti doplniť do riešenia aj metódu úpravy orientácie nástroja počas pohybu po trajektórii prostredníctvom merania externých momentov a využiť ďalšie externé snímače, vďaka čomu by sme mohli dosiahnuť lepšie výsledky a posunuli by sme sa tak vpred v našej vízii aplikovať robotickú kolaboratívnu aplikáciu pri ultrazvukovej terapii v praxi,“ dodáva I. Trepáčová. Navrhnutý základ by bolo možné rôznymi variáciami prispôsobiť nielen terapii mäkkého kolenného tkaniva, ale aj iných častí tela.
Autori príspevku veria, že robotika v medicíne sa bude ďalej rozvíjať a vznikne mnoho ďalších nápadov a návrhov aplikácií, ktoré by mohli prispieť k zlepšeniu zdravotníctva a uľahčeniu práce zdravotníckeho personálu.
Viac informácií o danej problematike
Bc. Izabela Trepáčová
xtrepacova@stuba.sk
Ing. Ľuboš Chovanec, PhD.
lubos.chovanec@stuba.sk
Ústav robotiky a kybernetiky
Fakulta elektrotechniky a informatiky STU
Ilkovičova 3, 812 19 Bratislava