

Burcu Seyidoglu je mladá vedecká pracovníčka a študentka inžinierskeho štúdia zo Strojníckej fakulty Bogaziçi University v Turecku. Podieľala sa na výskumnom projekte zameranom na vývoj nového robotického kolonoskopického zariadenia na bezbolestnú kolonoskopiu bez perforácie a krvácania. Hlavným prínosom Burcu v rámci projektu bol nový algoritmus riadenia polohy hrotu, ktorý umožnil presnejšie navádzanie kolonoskopického zariadenia v hrubom čreve. Vedecký prínos tohto algoritmu pozostáva z dvoch kľúčových segmentov: 1. schopnosť zvýšiť presnosť polohy korekciou deformácie, 2. zohľadnenie vonkajších zaťažení pri výpočte polohy hrotu robota.
B. Seyidoglu sa prihlásila na prvú otvorenú výzvu TERRINet v rámci nadnárodného prístupu, pretože mala záujem vylepšiť výkon algoritmu na vyspelejšej platforme. Jej kľúčovou výskumnou otázkou bolo, či by výmena algoritmov mohla viesť k ešte väčšej presnosti a odolnosti koncového efektora.
 |
Svoje celkové skúsenosti s TNA hodnotím veľmi pozitívne, pretože mi to umožnilo pracovať s vysokokvalifikovanými výskumníkmi v oblasti mäkkej robotiky a experimentovať na inovatívnej platforme. Burcu Seyidoglu je mladá vedecká pracovníčka a študentka inžinierskeho štúdia zo Strojníckej fakulty Bogaziçi University v Turecku. |
Bezplatný prístup k viac ako 100 robotickým platformám
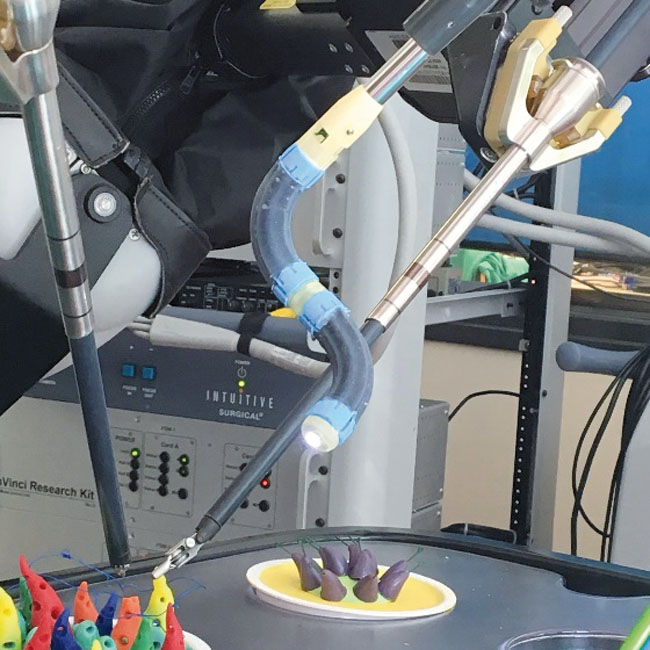
V rámci širokého portfólia platforiem dostupných cez sieť TERRINet sa B. Seyidoglu rozhodla otestovať svoj algoritmus na všesmerovom mäkkom robotickom ramene Stiff-Flop. Táto platforma odhalila perfektné spojenie s experimentmi B. Seyidoglu. Stiff-Flop je skutočne široko uznávanou platformou vhodnou na testovanie algoritmov riadenia.
Soft manipulátor Stiff-Flop vyvinuli pracovníci BioRobotics Institute of Scuola Superiore Sant’Anna (Pisa, Taliansko). BioRobotics Institute je lídrom vedeckého výskumu v Taliansku v oblasti biorobotiky s rozsiahlymi kompetenciami v rámci chirurgickej robotiky, neurónových technológií, kognitívnych systémov, mäkkej robotiky atď.
Implementácia algoritmu použitím platformy Stiff-Flop
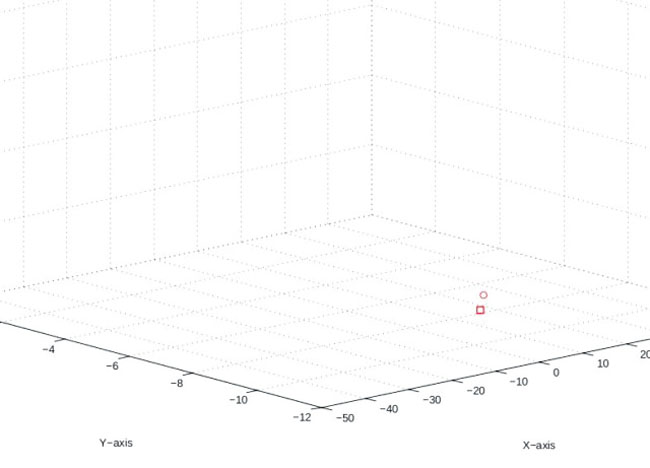
S podporou vysokokvalifikovaných výskumníkov z BioRobotics Institute nastavila B. Seyidoglu trojfázový model na implementáciu algoritmu na mäkkom robotickom ramene Stiff-Flop. Prvá fáza sa zamerala na štúdium a pochopenie existujúceho algoritmu Stiff-Flop. Na základe výsledkov vplyvu tvrdosti kremíka na ohýbanie a spevňovanie robota bol vyvinutý program na polohovanie špičky robota. Ako je znázornené na obr. 2, rozdiel medzi dosiahnutou polohou koncového efektora (špičky) pomocou programu a požadovanou polohou bol menší ako 5 %. Výsledky sa považovali za prijateľné.
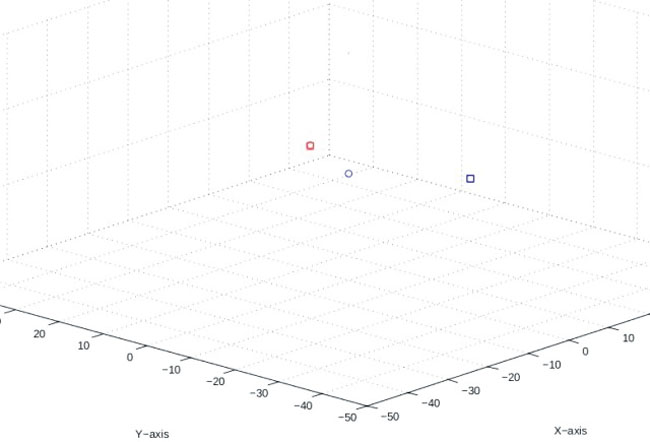
V druhej fáze bol vyvinutý program implementovaný na Stiff-Flop. Poloha koncového efektora (špičky) sa znova testovala, tentoraz použitím rôznych hodnôt tlaku (0, 0,25, 0,50, 0,75 a 1 bar) na vnútorné komôrky robota. Výsledky ukázali (obr. 3), že chyby polohy do 0,5 baru boli prijateľné, zatiaľ čo väčšie chyby viedli k úniku tlaku v komore a následným nežiaducim ohybom, ktoré ovplyvnili výsledky polohy.
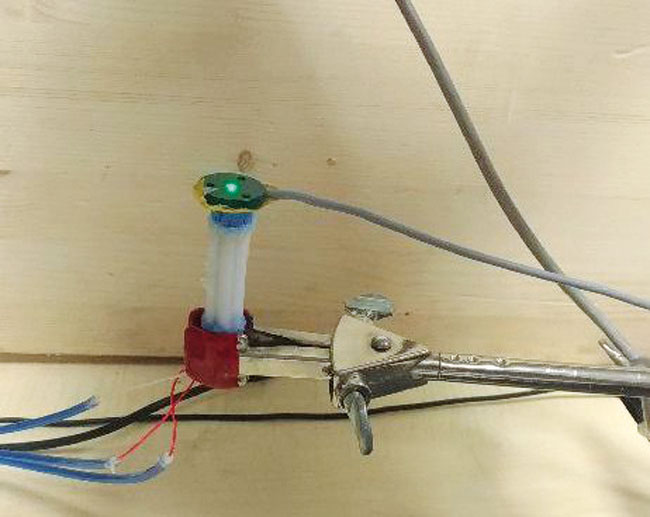
Tretia fáza bola venovaná testovaniu polohy koncového efektora (špičky) pomocou magnetického sledovacieho senzora Aurora (obr. 4). Cieľom bolo porovnať chyby medzi hodnotami senzorov a algoritmov, aby sa zlepšil výkon algoritmu.
Bol tento experiment úspešný?
Experimentálne výsledky ukázali, že:
- navrhnutý algoritmus možno implementovať v rôznych mäkkých typoch robotov, aj keď treba realizovať ďalšie modelovanie správania rôznych materiálov (napríklad pomocou nástroja Ogden Material Model);
- odchýlky polohy koncového efektora sa vyskytli v dôsledku zohľadnenia zaťaženia pri výpočtoch polohy; test ukázal, že pri implementácii algoritmu na ľahké manipulátory, ako je Stiff-Flop, netreba zohľadniť zaťaženie koncových efektorov;
- použitie magnetického senzora na Stiff-Flop vyžaduje účinnejšie experimentálne nastavenie bez vibrácií, pretože také okolnosti môžu neúmyselne ovplyvniť výsledky.
Dokáže TERRINet naštartovať vašu vedeckú kariéru?
B. Seyidoglu hodnotí svoje celkové skúsenosti s TNA veľmi pozitívne, pretože jej to umožnilo pracovať s vysokokvalifikovanými výskumníkmi v oblasti mäkkej robotiky a experimentovať na inovatívnej poprednej platforme, ako je napríklad mäkký manipulátor Stiff-Flop. Rozšírila si svoje vedomosti v oblasti mäkkej robotiky, najmä pokiaľ ide o zmeny tuhosti, modelovanie elastických materiálov a tvrdosť. Mala tiež možnosť použiť zariadenia, ako sú magnetické sledovacie senzory Aurora, a prvýkrát navrhnúť zostavu na presné riadenie polohy. B. Seyidoglu odporúča všetkým začínajúcim výskumníkom zapojiť sa do podobných projektov, pretože táto príležitosť môže podporiť ich presvedčenie vydať sa na vedeckú kariéru.
Európska sieť pre výskum robotiky
TERRINet je európska výskumná sieť pre oblasť robotiky schopná ponúknuť najkvalitnejšiu infraštruktúru, vynikajúce výskumné služby a odbornú prípravu študentom škôl, doktorandom, pracovníkom v priemysle a akademickým pracovníkom vrátane postdoktorandov či priemyselným podnikom všetkých veľkostí. Cieľom projektu je tiež rozvoj a vzdelávanie novej generácie výskumných pracovníkov v oblasti robotiky, ktorí sú schopní navrhovať, vyvíjať a riadiť robotické technológie. TERRINet slúži ako multidisciplinárne nadnárodné prostredie na uľahčenie vzájomného obohacovania sa nápadmi a zdieľania tých najlepších výsledkov vedeckých výskumov. Umožňuje rôznym používateľom (výskumníkom, podnikateľom, študentom…) získať ľahký prístup k rôznym zariadeniam v infraštruktúre poskytovateľov, aby mohli naplno využiť svoj potenciál a znásobiť svoj vplyv na výskum a inovácie.
Aj robotika bude čeliť základným vedeckým a technologickým výzvam, pričom experimentálnym spôsobom sa budú sledovať nové prelomové vízie v tejto oblasti. TERRINet umožňuje podporu inovácií prostredníctvom posilneného partnerstva výskumných organizácií s priemyslom. Vzdeláva sa nová generácia kvalifikovaných a vysoko kreatívnych výskumných pracovníkov, ktorá je pripravená optimálne využívať všetky základné nástroje svojho výskumu v akademickej aj priemyselnej oblasti. Integrovaný a harmonizovaný prístup k infraštruktúre a službám umožní ich využitie v podobe testovacích a hodnotiacich zariadení pre inovácie a umožní efektívnejší prenos technológií v Európe.
Zdroj: TERRINet SUCCESS STORY: A Novel Tip Positioning Control Algorithm for advanced Colonoscopy tested on a TERRINet platform. [online]. Citované 25. 11. 2019. Dostupné na: https://www.terrinet.eu/2019/11/25/terrinet-success-story-a-novel-tip-positioning-control-algorithm-for-advanced-colonoscopy-tested-on-a-terrinet-platform/.
