



Či už sa ocitneme v automobilovom a dodávateľskom priemysle, v strojárstve, vo výrobe elektroniky a hardvéru, v presnej mechanike alebo hodinárskom priemysle, všade sa využívajú montážne a automatizačné technológie, výrobky od saskej firmy KLEINIG Engineering GmbH & Co. KG. Jedným z dôvodov tohto úspechu na trhu je to, že spoločnosť, ktorá od roku 1998 sídli v Großpösne neďaleko Lipska, pokrýva celé spektrum strojárskych činností a spája vývoj, konštrukciu, návrh elektrických obvodov, programovanie, výrobu a servis pod jednou strechou.
Komplexná úloha
Odborníci z KLEINIG engineering boli teda dobre pripravení, keď dostali požiadavku od zákazníka automobilového priemyslu. Existujúci proces montáže mal byť automatizovaný, aby sa na jednej strane zvýšilo množstvo a výkon a na druhej strane znížil požadovaný počet pracovníkov. Konkrétne išlo o montáž gumovo-kovových ložísk pre čapy nápravy a ramená (lichobežníkové komponenty) zavesenia kolesa. Je to veľmi náročná automatizačná úloha, pretože tieto súčasti podvozku sú kované diely a niekedy majú veľkú výrobnú toleranciu. Vzhľadom na spôsob, akým sú navrhnuté, musí sa tolerancia zabezpečiť počas výrobného procesu a na to je potrebná vysoko flexibilná manipulácia. Poloha uchopenia je navyše na neopracovaných plochách, čo kladie na uchopovač ďalšie nároky.
Odborníci zo spoločnosti KLEINIG v tomto prípade uprednostňovali riešenie založené na robotoch. „Zákazník však mal spočiatku výhrady voči robotike,“ konštatuje obchodný manažér Tobias Franz. Táto skepsa nebola daná iba zložitosťou procesu montáže, ale aj skutočnosťou, že spoločnosť predtým nepoužívala roboty, a preto nemohla čerpať z vlastných odborných znalostí a skúseností v tejto oblasti. To, že sa zákazník nakoniec rozhodol pre túto možnosť, a teda pre vstup do robotiky vôbec, bolo dané presvedčivou koncepciou systému založenou na PLC, ktorú navrhli odborníci spoločnosti KLEINIG engineering. Medzičasom sa navrhnuté riešenie osvedčilo pre flexibilnú montáž v rámci výroby šarží veľkosti 1, a to bez vynaloženia veľkého úsilia.
Montážna bunka ako kompletné riešenie
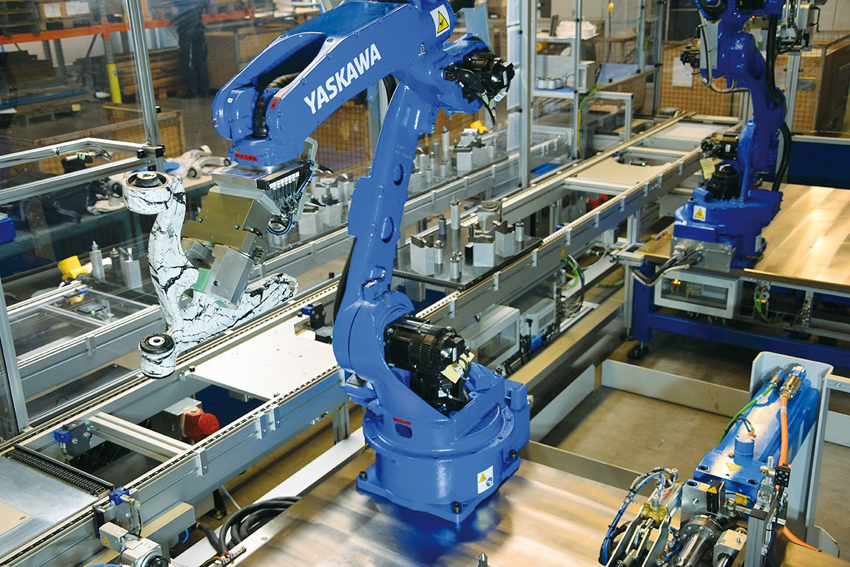
Kompletné riešenie kombinuje dve montážne stanice, jednu pre gumovo-kovové ložisko a druhú pre puzdro. Do každej stanice je integrovaný priemyselný robot. Oba kroky spracovania možno vykonávať súbežne. Obe stanice sú prepojené dopravníkovým systémom, na ktorom sú prepravované univerzálne nosiče obrobkov vhodné pre všetky varianty komponentov. V závislosti od komponentu sa čas cyklu pohybuje okolo jednej minúty. Na prevádzku celej bunky stačí jeden zamestnanec.
Jednotlivé diely, ktoré sa majú zmontovať, sú privádzané do montážnej bunky na pracovnú stanicu, kde sú ručne umiestnené na nosič obrobku. Roboty potom automaticky prevezmú kompletnú manipuláciu s komponentmi a všetky kroky obrábania. Konkrétne to zahŕňa:
- vloženie lichobežníkového komponentu do montážneho zariadenia v montážnej stanici na gumovo-kovové ložiská,
- kompenzáciu tolerancie komponentov,
- aktívne vyrovnanie spojovacej osi v komponente,
- manipuláciu s dvomi gumovo-kovovými ložiskami s cieľom namazania a umiestnenia do spojovacieho nástroja,
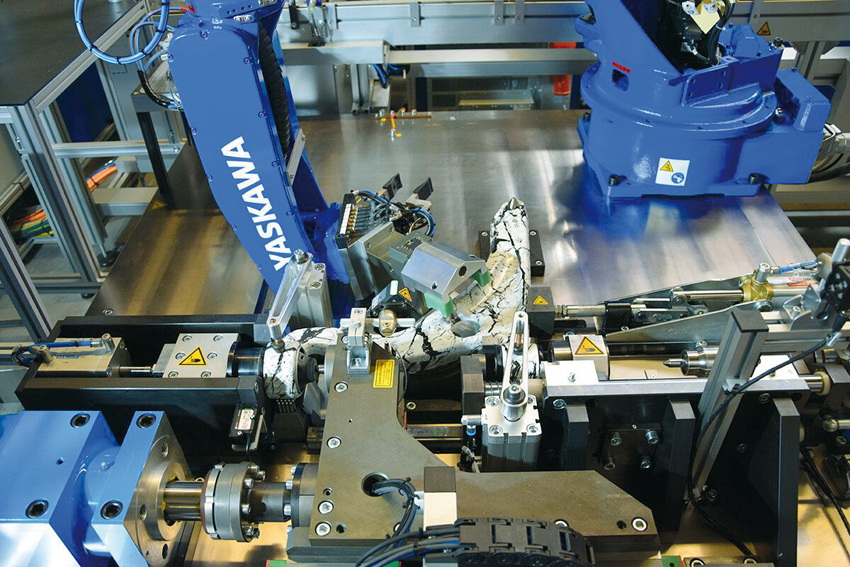
- montáž gumovo-kovových ložísk do lichobežníkového ramena inštalačného rozmeru pomocou dvoch servomotorizovaných spojovacích jednotiek (Kistler),
- záverečnú optickú kontrolu so snímačmi Keyence.
Zostavené lichobežníkové ramená sú potom umiestnené na nosič obrobku na ďalšiu prepravu. V nasledujúcej montážnej stanici puzdro prevezme robot: umiestni ho na lisovací nástroj, umiestni lichobežníkové alebo otočné ložisko do montážneho prípravku, zostaví puzdro pripojením osky bez otvorenia uchopovača, manipuluje s komponentom s cieľom etiketovania pomocou lepiacich etikiet, ukladá dobré diely na nosič obrobkov, zlé do prepraviek NIO a presúva nosič obrobkov s hotovým zostaveným komponentom mimo montážneho systému.
Pri oboch robotoch umožňujú dvojité chápadlá manipuláciu s rôznymi komponentmi, a to bez výmeny uchopovačov, vďaka čomu sa dosiahne rýchlejší čas cyklu. Prestavba z jedného typu komponentu na iný je tiež veľmi časovo úsporná použitím rýchlo výmenného systému Schunk SWK na automatickú výmenu uchopovača.
Rozhodnutie použiť manipulačný robot Motoman GP25
Pri výbere vhodných robotov bolo rozhodnutie technikov v spoločnosti KLEINIG engineering v prospech modelu Motoman jasné od samého začiatku. „So spoločnosťou YASKAWA sa poznáme už roky a sme s týmto rozhodnutím veľmi spokojní,“ zdôrazňuje David Kleinig, vedúci riadiacich technológií, pričom ako dôvody uvádza napríklad pohodlné uvádzanie do prevádzky a rýchlu telefonickú podporu.
Vďaka technickým vlastnostiam týkajúcim sa dosahu a výkonu boli dva roboty Motoman GP25 s nosnosťou 25 kg optimálne riešenie pre aktuálnu úlohu. GP znamená General Purpose – všeobecné využitie, teda na širokú škálu aplikácií. Šesťosové roboty sú preto ideálne na manipuláciu s dielmi a montážne úlohy. Rovnako ako všetky modely radu Motoman GP, aj GP25 je navrhnutý s vysokou triedou krytia IP67, takže je obzvlášť chránený pred vniknutím kvapalín a prachu. Možno ho teda použiť aj v drsných pracovných podmienkach, pretože sa veľmi ľahko čistí. Robot môže bez obmedzenia pracovať v akejkoľvek inštalačnej polohe. Káble robota možno vložiť bočne alebo cez vnútro podstavca. Keďže prívod médií je integrovaný v osiach, možno konštrukciu chápadiel optimalizovať a zaistiť maximálnu spoľahlivosť pri následnej prevádzke.
Kompaktný vysokovýkonný riadiaci systém YRC1000 navyše uľahčuje ovládanie a programovanie robota. Na to možno použiť klasické ručné programovacie zariadenie alebo inovatívny inteligentných ovládač.
Koncepcia riadenia
Výnimočnosťou navrhnutého riešenia je, že obidva roboty sú prostredníctvom funkčných modulov PLC priamo integrované do konceptu vyššej úrovne riadenia. To sa skladá z dvoch riadiacich systémov: jedného PLC na ovládanie celého systému a druhého PLC na integráciu zložitých pohybov robota. Systém je ovládaný centrálne pomocou mobilného panela (HMI). Vlastné pripojenie robotických ovládačov k PLC sa vykonáva prostredníctvom softvérového rozhrania MotoLogix. To umožňuje rýchle a jednoduché programovanie a ovládanie robotov Motoman od YASKAWA prostredníctvom PLC v spoločnom prostredí definovanom podľa IEC 61131. Rad podporovaných platforiem zahŕňa všetky bežné štandardy. Vývojári a konštruktéri v spoločnosti KLEINIG engineering používajú ovládače od spoločností Siemens a PROFINET.
Vďaka integrácii do PLC sú zachované všetky skutočné výhody riadiacej jednotky robota. Týmto spôsobom riadiaci systém robota vypočítava kinematiku pohybu a zaručuje vysokú kvalitu pohybu. To znamená, že znalosti YASKAWA v zabezpečení presných pohybov manipulátorov sú zaručené. Roboty a súvisiaci riadiaci systém od YASKAWA môžu ukázať svoje prednosti vo všetkých typoch manipulácie, ako je obsluha strojov, vychystávanie, balenie, ukladanie, paletizácia alebo dokonca meranie, testovanie a triedenie.
Jednoduchá integrácia riadenia robota do PLC sa oplatí nielen pri prevádzke zložitých výrobných závodov. S MotoLogix potrebujete na ovládanie robotov len vedomosti PLC, čím sa eliminuje potreba personálu vyškoleného na prácu s robotom alebo prostriedkov na rekvalifikáciu personálu.
To potvrdzuje aj D. Kleinig, ktorý sa podieľal na realizácii konceptu riadenia: „MotoLogix rozhodne uľahčuje koncovému používateľovi, teda našim zákazníkom, vstúpiť do sveta robotiky. Inými slovami, výrazne znižuje zábrany na strane zákazníka, ktorý sa pri ovládaní a programovaní robota pomocou softvéru môže aj naďalej pohybovať vo svete PLC, ktorý už pozná.“
Pozrite si video z montáže ložísk pomocou robotov Motoman.