



Hardvér
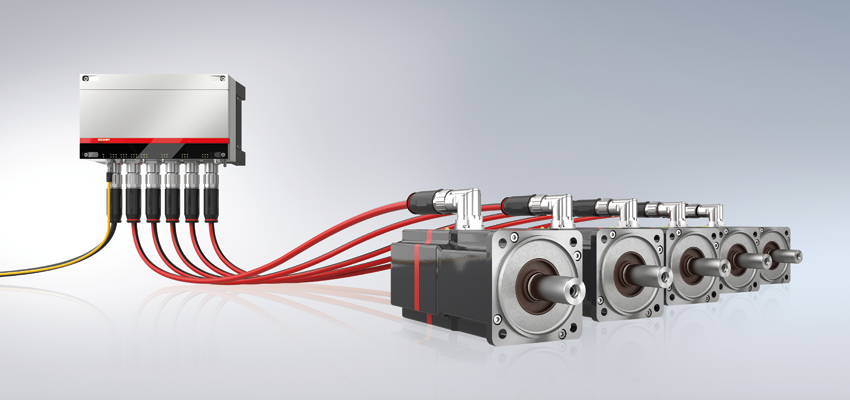
Prvou hardvérovou časťou distribuovaného systému AMP8000 sú napájacie moduly radu AMP8620. Napájacie moduly existujú v troch variantoch. Je to štandardný napájací modul, napájací modul s brzdným odporom a napájací modul s externým brzdným odporom. Vstupné napájanie je vždy 400 V AC. Celý systém následne pracuje s napätím 24 V DC pre elektroniku a s napätím 566 V DC jednosmerného medziobvodu (DC Link). Napájací modul má päť konektorov, na ktoré môžu byť pripojené buď priamo servomotory s integrovaným servomeničom, alebo distribučné moduly. Nechýbajú tu dva konektory na pripojenie boxov EtherCAT P I/O. Voľba konkrétneho napájacieho modulu závisí od aplikácie. S výberom pomôže zákazníkovi aplikácia TwinCAT Motion Designer, ktorá bude spomenutá na konci článku.
Distribučné moduly radu AMP8805 nadväzujú na napájacie moduly. Úlohou distribučných modulov je rozšíriť topológiu a zväčšiť počet prípojných miest na motory. Distribučný modul má päť konektorov, ktoré sú určené na pripojenie motorov s integrovaným servomeničom. Opäť tu nechýba konektor na pripojenie boxov EtherCAT P I/O. Počet distribučných modulov pripojených na jednom napájacom module samozrejme nie je neobmedzený. Maximálne možno použiť kaskádu troch distribučných modulov. Celkom teda možno do jednej kaskády pripojiť 17 motorov s integrovaným servomeničom. Pre väčšinu aplikácií nebude tento počet servomotorov limitujúci.
Okrem napájacích a distribučných modulov AMP8000 možno použiť napájací modul AX8620 v kombinácii s jednokanálovým alebo dvojkanálovým distribučným modulom AX8831/AX8831. Toto riešenie môže byť vhodné pre používateľov dobre známeho radu servomeničov AX8000, ktorým bude distribuovaný systém vyhovovať iba pre časť technológie.
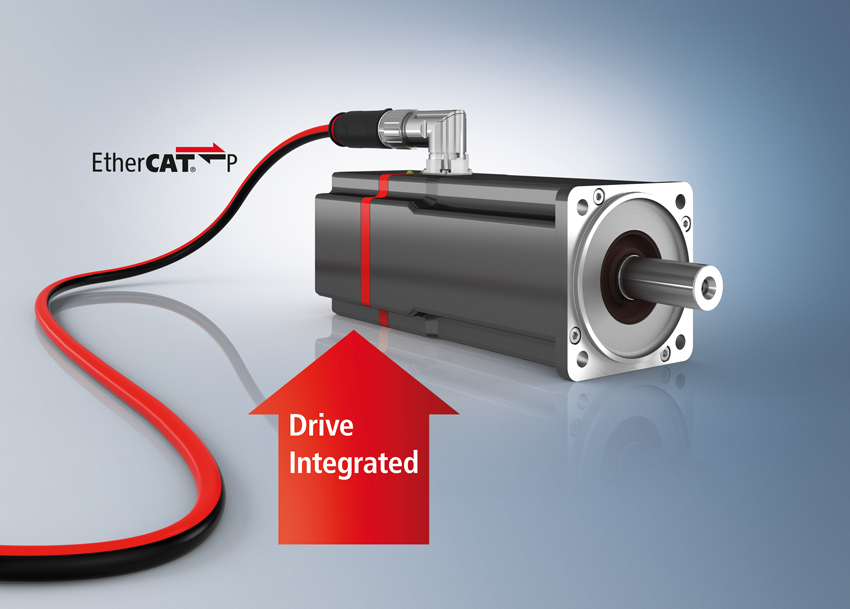
Servomotory AMP8000 s integrovaným servomeničom vychádzajú z úspešného radu štandardných servomotorov AM8000 s prírubami veľkosti F3 (72 mm), F4 (87 mm) a F5 (104 mm). V ponuke sú aj servomotory AMP8500 so zvýšeným momentom zotrvačnosti a s rovnakým rozmerom prírub. Výkonová elektronika servomeniča je zložená z niekoľkých PCB dosiek, ktoré sú vzájomne prepojené plochými káblami. Je umiestnená v samostatnej zadnej časti motora. Z dôvodu kvalitného odvodu tepla na hliníkové puzdro a odolnosti proti vibráciám je elektronika zaliata špeciálnou hmotou. Pre každý rozmer motora AMP8000/AMP8500 má zákazník ďalej možnosť vyberať z viacerých variantov.
Konkrétny variant motora je zostavený vo výrobnom závode na základe objednávky. Variabilita je pomerne široká. Spätná väzba je vždy absolútna, a to v jednootáčkovom alebo viacotáčkovom vyhotovení. Ďalej má zákazník možnosť výberu vyhotovenia s pracovnou brzdou. Tu je dôležitý pojem „pracovný“. Táto brzda nie je konštruovaná na dynamické brzdenie a je určená iba na zaistenie hriadeľa, pokiaľ je servomotor v pokoji. Ďalšie varianty servomotorov sú z pohľadu safety funkcií. Vo fáze projektovania treba vždy vedieť, ktoré safety funkcie budú z hľadiska funkcie zariadenia použité. AMP8000/AMP8500 možno objednať vo variantoch bez safety funkcií, s funkciami STO/SS1 a vo variante s kompletnou safety funkcionalitou na bezpečné zastavenie, bezpečnú rýchlosť, pozíciu, bezpečné zrýchlenie, bezpečný smer a bezpečné funkcie brzdy. Vyhotovenie s implementovanými safety funkciami majú integrovaný safety procesor. To znamená, že safety aplikácia môže pracovať priamo v AMP8000/AMP8500 bez nutnosti použitia externého safety procesora. Výmena safety dát medzi jednotlivými safety procesormi v integrovaných servomeničoch a I/O safety moduloch prebieha po zbernici EtherCAT P v FSOE dátach.
Servomotory, distribučné a napájacie moduly sú prepojené pomocou EtherCAT P, čo sú hybridné káble. EtherCAT P kombinuje komunikačný kábel EtherCAT, napájací kábel pre elektroniku servomeniča (24 V DC), ochranný vodič a kábel na napájanie jednosmerného medziobvodu (DC Link). Maximálna dĺžka kábla EtherCAT P na pripojenie motora s integrovaným servomeničom je 30 m. Dĺžku kábla nemožno vzhľadom na jeho charakter predĺžiť použitím tlmivky. Medzi napájacím a distribučným modulom možno použiť kábel až s dĺžkou 75 m.
Softvér
V prvej časti článku bol spomenutý TwinCAT Motion Designer. Tento softvér sa postupne stal neoddeliteľnou súčasťou optimálneho návrhu aplikácie s pohonmi Beckhoff. Nesúvisí teda iba so systémom AMP8000, ale databáza TwinCAT Motion Designer aktuálne obsahuje všetky vyrábané komponenty súvisiace s riadením pohonov Beckhoff. Na základe správnych vstupných údajov o mechanike a dynamike pohybov možno správne navrhnúť všetky komponenty, a to vrátane kabeláže a príslušenstva. Nespornou výhodou je tiež možnosť stiahnutia tohto softvéru zadarmo z webových stránok spoločnosti.
Ďalším softvérom je TwinCAT Drive Manager 2. Inštaluje sa ako doplnok softvéru TwinCAT3. TwinCAT Drive Manager 2 je určený na parametrizáciu pohonov Beckhoff. Opäť teda nesúvisí iba s AMP8000, ale je určený na parametrizáciu všetkých komponentov na riadenie pohybu – servomeniča, riadenie krokových motorov, DC a BLDC motorov.
Softvérová konfigurácia AMP8000 nie je vzhľadom na rovnaký konfiguračný softvér TwinCAT Drive Manager 2 príliš rozdielna od konfigurácie servomeničov AX8000 alebo servoterminálov ELM7200. Zostal zachovaný princíp CoE objektov aj prístup k týmto objektom zo strany NC riadenia aj zo strany PLC programu. Hlavným rozdielom je zobrazenie AMP8000 v hardvérovej konfigurácii. Treba si uvedomiť, že pri štandardnom servomeniči s komunikačným rozhraním EhterCAT sú v hardvérovej konfigurácii ako EtherCAT Slave zobrazené komponenty servomenič, safety časť, prípadne napájací modul (AX8000), ale nie motor. Pri systéme AMP8000 je to rozdielne, ako EtherCAT Slave sú zobrazené komponenty napájací modul, distribučný modul, integrovaný servomenič a safety časť. Napájací a distribučný modul sú navyše zobrazované dvakrát, ako časť A a časť B. To je dané interným zapojením zbernice EtherCAT. Každý modul má dva EtherCAT slave so štyrmi portmi.
S koncepciou AMP800 sa tak otvárajú nové možnosti pre modulárne riešenie strojov a s ohľadom na krytie IP65 pri všetkých častiach AMP8000 aj optimalizácia veľkosti rozvádzačov.

