


Keď sa pozrieme na históriu vývoja bezpečnosti robotických liniek, môžeme sa stretnúť s rôznym stupňom použitia ochranných prvkov. Z praxe sme zvyknutí, že robotické pracovisko je ohradené a operátor má komplikovaný vstup do pracovného priestoru – musí použiť dvere. Aktuálne sa stretávame s pracoviskami, kde je obsluha chránená pred nebezpečnými časťami robota, griprom a prenášaným dielom svetelnou bariérou, prípadne skenerom. Na pracoviskách s kolaboratívnymi robotmi nie je priestor medzi robotom a človekom nijakým spôsobom oddelený a robot spolupracuje s človekom.
Pri všetkých robotických aplikáciách sa vždy vychádza zo základných noriem, ktoré treba pri návrhu pracoviska zohľadniť. Ide o STN EN 10218-2 Roboty pre priemyselné prostredie – bezpečnostné požiadavky a ISO/TS 15066 týkajúca sa návrhu kolaboratívnych pracovísk.
Pre konvenčné bunky vyvinulo ABB opciu Safe Move. Tento prvok prešiel za posledné roky rôznymi inováciami. SafeMove I. umožňuje kontrolovať osem bezpečnostných zón. Obsahuje vstupno-výstupné rozhranie, kde sa cez nadradený bezpečnostný systém dajú aktivovať jednotlivé kontrolované zóny a sledovať stav robota podľa toho, v akej zóne sa nachádza. SafeMove I. našiel praktické využitie napríklad pri obsluhe vstrekolisov. Bezpečnostnú zónu v lise tu možno nastaviť tak, že robot posiela priamo do lisu bezpečnostný signál o tom, či sa nachádza vo forme alebo mimo nej. Ďalšou zónou možno kontrolovať pracovný priestor robota. Toto zapojenie je jednoduché a šetrí dodatočné náklady na použitie nadradeného bezpečnostného systému.
Aktuálne je na trhu uvedený už aj SafeMove druhej generácie zahŕňajúci bezpečnostné komunikačné rozhrania ako CIP safety a ProfiSafe. Po týchto zberniciach možno veľmi jednoduchým spôsobom sledovať a aktivovať jednotlivé bezpečnostné funkcie. SafeMove II. našiel uplatnenie v aplikáciách, pri ktorých treba kontrolovať iba priestor robota. V tomto prípade sa používa verzia Basic. Ak by robot prekonal nastavenú zónu, robot sa sám bezpečne zastaví. Verzia Pro umožňuje nastaviť až 16 bezpečnostných zón. Dá sa tak bezpečne kontrolovať veľké množstvo napríklad paletizačných zón a zariadení. Pritom netreba použiť štandardný spôsob prepojenia riadiacej skrine pomocou kabeláže s nadradeným bezpečnostným systémom, stačí využiť komunikáciu ProfiSafe vo verzii Host alebo Device. Sú to hlavne signály auto stop, emergency stop a volič režimov.
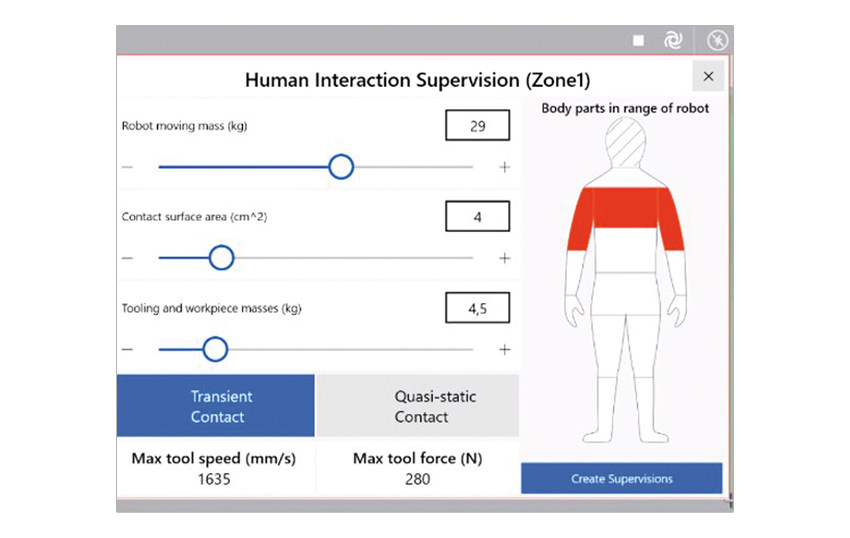
S príchodom kolaboratívnych robotov uviedlo ABB na trh novú inovatívnu bezpečnosť prinášajúcu veľa nových funkcií pre programátorov, ale i samotných pracovníkov vyškolených na kolaboratívnu bezpečnosť. Umožňuje priamo nastavovať pomocou teachpendantu jednotlivé bezpečnostné funkcie vrátane bezpečnostných zón a, čo je podstatné, prináša jednoduchý vizuálny návod, ako nastaviť jednotlivé zóny ochrany človeka. Ako vidieť na obrázku, vyškolený pracovník môže jednoduchým spôsobom nastaviť a zadefinovať sily pôsobiace na operátora a rýchlosť robota vrátane bezpečnostnej oblasti.
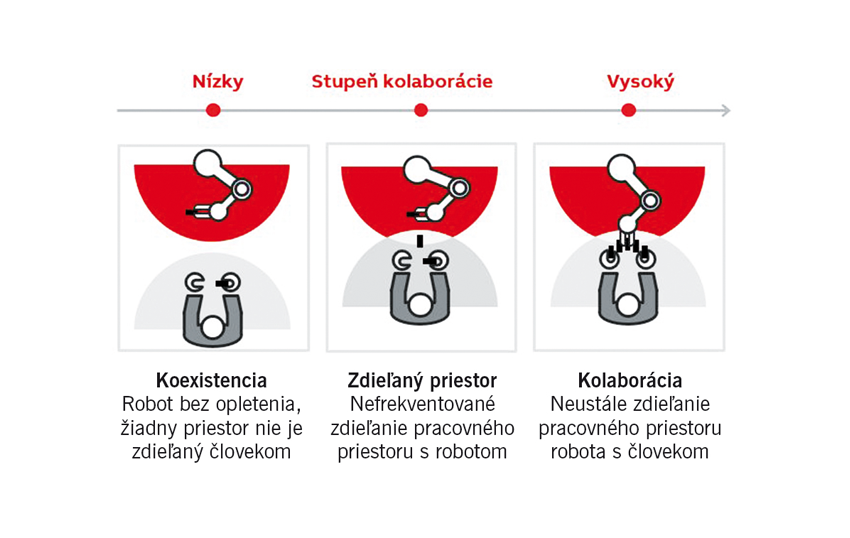
Prvým a zásadným predpokladom úspešného a bezpečného pracoviska je kvalitná analýza rizík. Na základe nej sa dá zadefinovať typ pracovného priestoru:
- koexistencia,
- priestor využívaný spoločne s robotom,
- priama kolaborácia s robotom.
Podľa typu pracoviska sa následne použijú správne bezpečnostné prvky ako SafeMove I, II a SafeMove Colaborative. Ďalším dôležitým faktorom, ktorý treba pri návrhu zohľadniť, sú použité materiály, ktoré výrazne znižujú riziko úrazu. Pri kolaboratívnych robotoch je to hlavne kolaboratívny griper vyrobený z mäkkého materiálu, prípadne bez ostrých hrán, s bezpečnou silou zatvárania čeľustí a pod.
Cieľom spoločnosti ABB je poskytovať maximálnu podporu pri návrhoch robotických aplikácií. Tiež ponúka možnosť vyškoliť sa v špecializovanom školiacom centre v Bratislave. Tím školiteľov vás uvedie do detailnej problematiky nastavovania bezpečnostných funkcií robota, či už konvenčného, alebo kolaboratívneho.
Radi vás privítame. Na bezpečnosti a zdraví ľudí nám záleží!
Tomáš Magula
