


Ide o viacosový systém s kompaktnými rozmermi na priestorovo úspornú inštaláciu do rozvádzačov. Umožňuje veľmi presné a dynamické polohovanie s extrémne krátkymi riadiacimi cyklami. Ďalšími výhodami sú rýchla inštalácia a uvedenie do prevádzky, jednoduché zapojenie osových modulov, technológia OCT (One Cable Technology) a priama integrácia bezpečnostných funkcií a sieťových filtrov. Špeciálnou vlastnosťou je implementovaná technológia XFC (eXtreme Fast Control) od firmy Beckhoff, ktorá je v kombinácii so zbernicou EtherCAT výkonným nástrojom na časovo kritické úlohy v celom rade priemyselných odvetví.
Modulárny systém
AX8000 je modulárny systém, ktorým možno riešiť široké spektrum aplikácií. Výhodou je veľký rozsah výkonu od 0,2 do 120 kW a tiež krútiaceho momentu servomotorov od 0,2 do 180 Nm.
Základom sú štyri varianty napájacieho modulu:
- AX8620-1000 – 10 A, napätie 100 – 240 V AC (1~) alebo 20 A, 200 – 230 V AC (3~),
- AX8640-1000 – 40 A, napätie 200 – 240 V AC (3~),
- AX8620-0000 – 20 A, napätie 400 – 480 V AC (3~),
- AX8640-0000 – 40 A, napätie 400 – 480 V AC (3~).
Súčasťou napájacieho modulu je komunikačné rozhranie EtherCAT na pripojenie k priemyselnému PC, prípadne ďalším modulom EtherCAT. K napájaciemu modulu sú pripojené jednokanálové alebo dvojkanálové osové moduly:
- AX8108-0000 – modul pre jednu os 1x 8 A,
- AX8118-0x00 – modul pre jednu os 1x 18 A,
- AX8206-0x00 – modul pre dve osi 2x 6 A.
Uvedené hodnoty platia pre nominálny prúd. Špičkový prúd jedného kanála je dvojnásobný. V ponuke je tiež kombinácia napájacieho modulu a jednokanálového osového modulu s nominálnym výstupným prúdom 25 A alebo 40 A.
Osový modul
Osový modul obsahuje DC-Link a striedač na napájanie motora. V závislosti od požadovaného počtu osí sú osové moduly pripojené k napájaciemu modulu na vytvorenie viacosového servosystému. Aby bolo možné optimalizovať návrh jednotlivých osí, možno kombinovať moduly s rôznym nominálnym prúdom. Možnosť širokého rozsahu napájacieho napätia od 100 do 480 V AC umožňuje pripojiť osový modul k ľubovoľnému napájaciemu modulu AX86xx. Táto flexibilita zjednodušuje konfiguráciu stroja pre akýkoľvek typ sieťového napájania. Elektrické pripojenie jednotlivých modulov k sebe je možné bez použitia nástrojov. DC-Link, 24 V DC a komunikácia EtherCAT medzi modulmi sa pripája automaticky. Pripojenie DC-Link umožňuje výmenu energie pri zrýchľovaní a brzdení. Brzdná energia je primárne uložená v spoločnom DC-Link. Modul kondenzátora AX8810 rozširuje kapacitu DC-Link a je vhodný najmä v kombinácii s jednofázovým napájaním AX8620-1000. Energia, ktorá sa generuje pri brzdení, sa primárne ukladá v kapacitnom module. Tým sa znižujú straty energie, pretože sa menej využíva brzdný odpor. Pomocou kondenzátorového modulu možno znížiť celkovú pripojenú záťaž a tiež zmenšiť veľkosť poistky. Novinkou tohto roku bude rozšírenie portfólia o modul AX8820 na rekuperáciu energie.
Technológia OCT
Servozosilňovač AX8000 podporuje technológiu pripojenia servomotorov OCT. Na napájanie servomotrov a spätnoväzobné signály je použitý iba jeden kábel. Toto riešenie umožňuje znížiť náklady na kabeláž, zmenšiť priestorové nároky v káblových žľaboch a reťaziach a tiež eliminovať chyby pri zapojení. Servomotory s technológiou OCT majú integrovaný elektronický štítok, ktorý obsahuje parametre servomotora, informácie o spätnej väzbe a základné nastavenia pre regulátory servozosilňovača. Kompatibilné servomotory pre AX8000 sú označené AM8000, AM8500, AM8700 a AM8800.
Integrované bezpečnostné funkcie na riadenie pohybu
Všetky osové moduly AX8000 sú dostupné v troch variantoch podľa DIN EN ISO 13849-1: 2008 (kategória 3, kategória 4, PL c, d, e):
- bez bezpečnostných funkcií (koncové označenie -0000),
- vo vyhotovení STO/SS1 (koncové označenie -0100),
- vo vyhotovení so všetkými bezpečnostnými funkciami (koncové označenie -0200):
– funkcia zastavenia STO, SOS, SS1, SS2,
– funkcia bezpečnej rýchlosti SLS, SSM, SSR, SMS,
– pozičné funkcie SLP, SCA, SLI,
– funkcia zrýchlenia SAR, SMA,
– funkcia smeru otáčania SDIp, SDIn,
– funkcia brzdy SBC,
– funkcia obmedzenia krútiaceho momentu SLT.
Technológia eXtreme Fast Control (XFC)
AX8000 s komunikáciou EtherCAT kombinuje výkonnú technológiu FPGA s viacjadrovými procesormi ARM. Nová multikanálová regulácia prúdu ponúka extrémne krátky čas vzorkovania a reakcie. Hardvérovo implementovaný prúdový regulátor kombinuje výhody analógovej a digitálnej riadiacej technológie. Reakcia na aktuálnu odchýlku od žiadanej hodnoty prúdu je do 1 µs. Čas cyklu rýchlostného regulátora je 16 µs pri spínacej frekvencii 32 kHz. Spracovanie procesných údajov EtherCAT (skutočné a požadované hodnoty) prebieha bez procesora takmer bez omeškania v hardvéri, takže minimálny čas cyklu zbernice EtherCAT je iba 62,5 µs.
Spracovanie signálov v AX8000
Pri použití zbernice EtherCAT nie je ťažké dosiahnuť čas cyklu 62,5 µs. Je však ťažké zaistiť, aby tak rýchlo reagovali výkonové polovodiče. To znamená jednotky µs po tom, čo servomenič prijal rámec EtherCAT-u, ktorý sa spúšťa so signálom distribuovaných hodín (DC – Distributed Clocks).
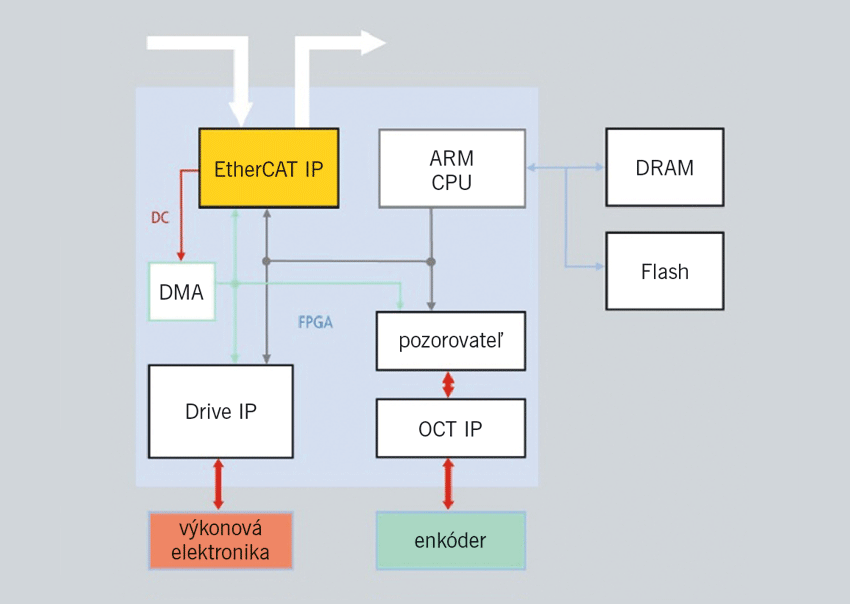
Viacosový servosystém AX8000 tieto požiadavky spĺňa. Smerom k priemyselnému PC komunikuje AX8000 cez napájací modul pomocou EtherCAT-u so štandardnou ethernetovou technológiou. Interne používa AX8000 zbernicu EtherCAT Terminal system bus (E-bus), ktorá oneskoruje ethernetové rámce iba o niekoľko nanosekúnd. Kľúčovou súčasťou osových modulov je výkonný FPGA, ktorý má na jednom kremíkovom čipe programovateľnú logiku a dvojjadrový procesor ARM. Programovateľnú logiku používajú predovšetkým tri moduly VHDL IP (Intellectual Property):
- servomenič (IP Core), vektorové riadenie motora naprogramované vo VHDL,
- EtherCAT (IP Core), spracovanie rámcov zbernice EtherCAT metódou on-the-fly,
- spätná väzba (IP), OCT na pripojenie enkodérov EnDAT.
Servomenič (IP Core), vektorové riadenie motora naprogramované vo VHDL
Prúdový regulátor, ktorý je implementovaný do hardvéru (VHDL), spája výhody analógovej a digitálnej regulačnej techniky. To umožňuje reakciu na regulačné odchýlky v rámci jedinej mikrosekundy, a to bez vypnutia systému z dôvodu nadprúdu.
EtherCAT (IP Core), spracovanie rámcov zbernice EtherCAT metódou on-the-fly
Jadro EtherCAT-u IP umožňuje implementáciu komunikačnej funkcie zbernice EtherCAT v rámci FPGA. Funkcionalita priemyselnej zbernice EtherCAT vrátane niekoľkých FMMU a SYNC Manager, veľkosť DPRAM atď. je nakonfigurovaná podľa požiadaviek AX8000. Tieto vlastnosti sú kompatibilné so špecifikáciou EtherCAT a EtherCAT ASIC (ET1100, ET1200).
Spätná väzba (IP), OCT na pripojenie enkodérov EnDAT
Všetky servomotory Beckhoff z radu AM8000 sú štandardne vybavené jednokáblovou technológiou (OCT). Komunikácia s enkodérmi integrovanými do motorov prebieha prostredníctvom OCT spätnej väzby implementovanej do FPGA, kde dochádza k internej synchronizácii so signálom EtherCAT DC. Voliteľne možno použiť aj enkodéry EnDAT.
Flexibilná jednotka DMA
Namiesto pripojenia týchto IP modulov pomocou veľkého množstva signálov a multiplexorov sú v rámci FPGA podporované dve možnosti. Dátové slová sú čítané alebo zapisované pomocou procesora alebo sú nezávisle od procesora kopírované jednotkou DMA s presnosťou v nanosekundách. Na obr. 2 je znázornená zjednodušená bloková schému funkcie FPGA. Týmto spôsobom možno prenášať nastavené hodnoty, ktoré sa počas niekoľkých nanosekúnd spúšťajú signálom DC, a to napríklad z duálneho portu RAM EtherCATovej IP do IP registrov pohonu. Podobne možno kopírovať skutočnú hodnotu – rovnako časovo spúšťanú – z enkodéra do duálneho portu RAM EtherCAT IP, ktorá je ďalej odoslaná do riadiacej jednotky, pričom nabudúce dôjde opäť k spracovaniu zodpovedajúceho rámca EtherCAT-u.
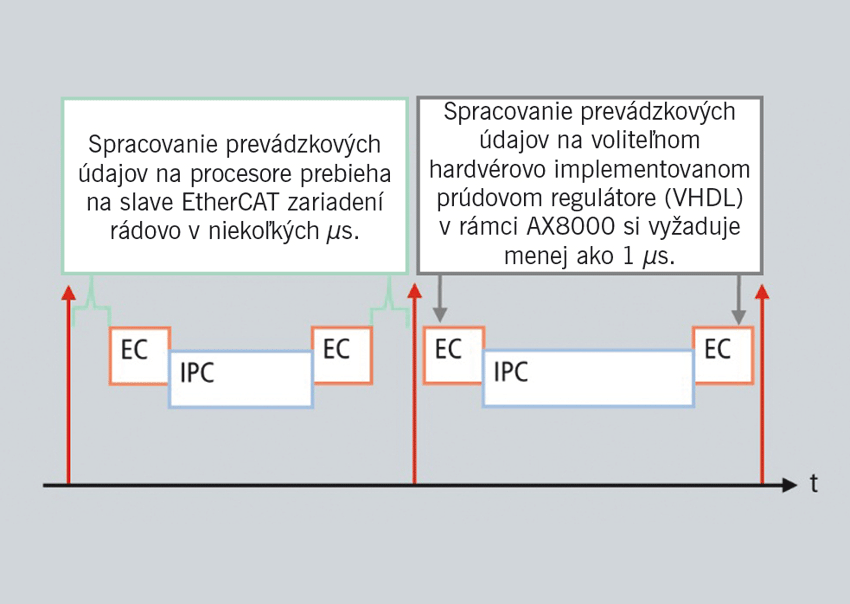
Mimoriadne krátky čas oneskorenia v kombinácii s riadiacou technológiou VHDL (t. j. v hardvéri) umožňuje, aby boli z dôvodu prenosu skutočných hodnôt rámce EtherCAT s nastavenými hodnotami spracované tesne pred signálom DC alebo krátko po ňom. Extrémne nízky čas oneskorenia poskytuje algoritmom IPC viac času. Alternatívne možno znížiť čas cyklu (obr. 3).
V praxi to znamená, že AX8000 môže v jednom cykle spracovať dva rámce, aj keď je čas cyklu iba 62,5 µs. Treba však poznamenať, že taký vysoký výkon sa dá dosiahnuť iba pri pomerne malých subsystémoch s relatívne krátkymi ethernetovými rámcami. Pri väčších systémoch možno požadovaný čas cyklu dosiahnuť rozdelením komunikácie priemyselnej zbernice EtherCAT do niekoľkých paralelných častí.
IP riadenie pohybu
V posledných rokoch sa mnoho tímov zaoberalo výskumom a vývojom inovatívnych algoritmov pre synchrónne, reluktančné a asynchrónne motory alebo konkrétnymi projektmi z oblasti kinematiky. Vzhľadom na nedostatok otvorených, štandardizovaných rozhraní a času sa jednotlivé hardvérové komponenty vytvárajú v malých množstvách.
Koncepcia duševného vlastníctva (IP) nebola až doteraz aplikovaná na riadenie pohonov. Výrobcovia hardvéru obvykle ani firmám, ktoré stroje stavajú, ani koncovým zákazníkom neposkytujú informácie o architektúre zariadenia. Je to predovšetkým z dôvodu nízkeho výpočtového výkonu mikrokontrolérov alebo DSP, ktoré sa používali v minulosti a ktoré sú obvykle naprogramované v Assembleri alebo hardvérovo orientovanom „C“.
Použitie koncepcie IP je dobrou voľbou, ale hovoríme tu o servozosilňovači na báze TwinCAT. Vďaka dnešnej dostupnosti hardvéru je programovanie servozosilňovača oveľa menej časovo náročné. Počet požadovaných úloh v rámci servozosilňovača je zredukovaný, a to predovšetkým vďaka skutočnosti, že niektoré z algoritmov vnútri FPGA sú implementované vo VHDL. Zložité algoritmy možno vypočítať pomocou vysoko výkonnej jednotky ARM CPU s FPU. Okrem toho sa vďaka využitiu kompilačnej technológie výkon inštalovaného procesora využíva oveľa efektívnejšie.
MATLAB®/Simulink® od firmy MathWorks je štandardným nástrojom na simuláciu systémov s uzavretou slučkou. Prakticky všetky vývojové oddelenia majú aspoň jednu licenciu. Pripojenie MATLAB®/Simulink® umožňuje vytváranie modulov TwinCAT, ktoré boli generované ako modely v simulačnom prostredí Simulink®. Vďaka integrácii s TwinCATom možno parametre a premenné zobraziť v grafickom používateľskom rozhraní TwinCAT 3 a možno ich tiež prezerať a upravovať v reálnom čase za chodu.
