



Štandardné priemyselné robotické rameno tvorí šesť otočných osí. To znamená, že má šesť motorických pohonných jednotiek poháňajúcich jednotlivé osi robota. Tieto osi zabezpečujú takzvaných šesť stupňov voľnosti. Vďaka nim je robot so svojím koncovým efektorom schopný lineárneho pohybu v troch nezávislých smeroch X, Y a Z a súčasne je schopný otáčať sa okolo týchto osí, teda Rx, Ry a Rz.
Neštandardné priemyselné ramená sú oproti tým štandardným tvorené iným počtom nezávislých osí, ktoré môžu byť otočné aj lineárne. Na základe počtu a vyhotovenia osí ich môžeme rozdeliť do troch kategórií:
1. sedemosové roboty – kolaboratívne roboty,
2. štvorosové roboty – paletizačné roboty, roboty SCARA a paralelné roboty Delta,
3. jedno- až trojosové roboty – karteziánske roboty, ktoré sú na rozdiel od predošlých robotov najčastejšie tvorené lineárnymi nezávislými osami pohybu.
Roboty SCARA, Delta a karteziánske roboty majú síce niekoľko výrazných obmedzení oproti štandardným šesťosovým robotom, no sú neprávom zaznávané. V istých typoch aplikácií svojím potenciálom jednoznačne prevyšujú možnosti šesťosových robotov. Ich obmedzenia v rotácii vyvažuje kinematika umožňujúca zvýšiť maximálnu rýchlosť, zrýchlenie a momenty. Tým dokážu výrazne znížiť čas cyklu a bezkonkurenčne prekonať štandardné robotické ramená.
Robotické rameno SCARA (Selective Compliance Assembly Robot Arm) je zložené zo štyroch osí, jednej lineárnej a jednej otočnej osi, ktoré zabezpečujú pohyb a rotáciu okolo osi Z. Ďalšie dve otočné osi zabezpečujú pohyb v osiach X a Y. Tie sú orientované zvislo, aby motory s prevodovkami nemuseli pri otáčaní prekonávať gravitačné sily. Celý ich výkon je tak sústredený do pohybu. Vďaka takejto kinematike patria roboty SCARA medzi najrýchlejšie roboty na svete a využívajú sa najmä pri aplikáciách typu Pick and Place, manipulácii, kontrole kvality a montážnych operáciách. V porovnaní s inými robotickými ramenami sú tieto roboty extrémne rýchle a finančne výhodné. Na druhej strane majú nižšiu nosnosť, menší pracovný priestor a obmedzenú flexibilitu. Roboty SCARA od firmy ABB pod označením IRB 910SC a po novom aj invertovaná SCARA IRB 910INV sú špecifické tým, že skupina vývojárov odstránila spomínané nevýhody softvérovo. Pomocou podrobných štúdií vyvinuli špecifické pohybové príkazy, ktoré zvyšujú efektivitu pohybov a tým výrazne znižujú čas cyklov.
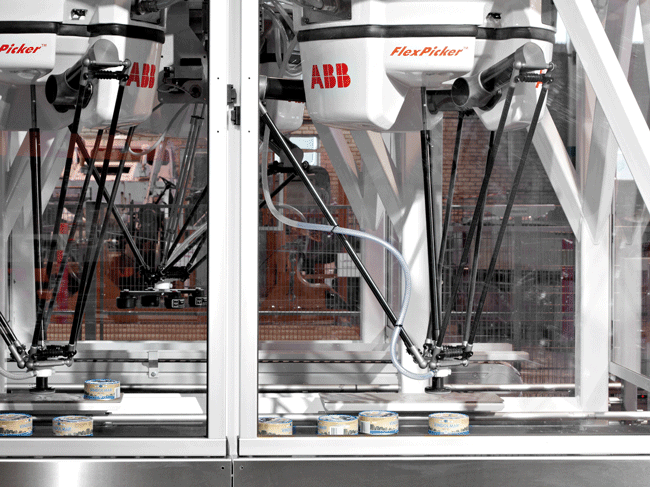
Roboty Delta sú úplne odlišné od všetkých spomínaných robotov. Paralelný robot Delta je zložený z troch ramien pripojených k základni robota univerzálnymi kĺbmi. Základná myšlienka pohybu spočíva vo využití parallelogramov. Parallelogram zabezpečuje konštantnú orientáciu koncového efektora pri akomkoľvek natočení vstupného kĺbu. Spojením troch parallelogramov sa zabezpečí pohyb v osiach X, Y a Z. Pohyb jednotlivých ramien i rotáciu koncového efektora v osi Z zabezpečujú pohony v základni robota. Umiestnenie ťažkých elektromotorov v základni odľahčí ramená a ich celková hmotnosť je reprezentovaná len materiálom, z ktorého sú vytvorené. Ak sa použije vhodný tuhý a ľahký materiál, zabezpečí sa nízka hmotnosť ramien a zníži sa aj celkový moment robota. Celý výkon pohonných jednotiek sa tak sústredí do extrémne rýchleho pohybu bez potreby anulovať moment zotrvačnosti. Výsledkom je vyššia rýchlosť robotov Delta oproti robotom SCARA, ktoré musia anulovať moment zotrvačnosti vznikajúci z pohonných jednotiek jednotlivých ramien. Využitie aj výhody a nevýhody robotovDelta sú podobné ako pri robotoch SCARA. Tým, že sú roboty Delta umiestnené na strope „dolu hlavou“, aj pracovný priestor, v ktorom takýto robot pracuje, je bez akýchkoľvek prekážok. Tieto roboty sú obzvlášť obľúbené v potravinárskom priemysle.
Pri vývoji robotov Delta stála firma ABB, ktorá si následne dala takýto typ robotov patentovať. Vďaka času a financiám, ktoré boli investované do vývoja týchto robotov, predbehla ABB svoju dobu a súčasne svoju konkurenciu. Aby boli úspech a využiteľnosť týchto robotov ešte väčšie, vyvinula ABB aplikačný softvér PickMaster®, ktorý koncovým používateľom prináša grafické používateľské rozhranie. Používateľ v ňom dokáže nakonfigurovať, naprogramovať a spojazdniť robotickú linku do jednej hodiny. V portfóliu ABB sa nachádza robot Delta IRB 360 s dosahom 800 až 1 600 mm a nosnosťou 1 až 6 kg.
Karteziánske roboty sú zariadenia, ktoré môžu mať jednu, dve, tri alebo aj viac nezávislých pohybových osí. Najčastejšie ide o lineárne osi, ktoré zabezpečujú pohyb v osi X, Y a Z. Tieto zariadenia sa takmer vo všetkých aplikáciách využívajú na manipuláciu, teda „zdvihni a polož“. Veľkosť pracovného priestoru je obmedzený výlučne vzhľadom na rozsah pohybu jednotlivých osí, počnúc malými laboratórnymi zariadeniami až po gigantické portálové pojazdy. Výhodou karteziánskych robotov je veľkosť ich pracovného priestoru, ktorá môže byť niekoľkonásobne väčšia ako pri ostatných typoch robotov, majú tiež väčšiu nosnosť a tuhosť. Nevýhodou je, že ich dynamika a presnosť je nižšia ako pri ostatných typoch robotov.
Možno sa z uvedených informácií zdá, že tieto roboty sú úplne odlišné a že každý robot má prirodzene určenú oblasť využitia. No opak je pravdou. Tieto roboty sú si veľmi podobné a odlišujú ich len kľúčové faktory vyplývajúce z ich kinematiky. Rozhodnúť sa pre konkrétny typ robota je pomerne zložitý proces, ktorý predchádza podrobnej analýze. Pri výbere robotického ramena rozhoduje cena, rýchlosť robota, čas cyklu, opakovateľnosť, nosnosť, pracovný priestor, servis a ďalší rad faktorov.
Viktor Dluhoš
ABB. s.r.o.
