

Skutočný potenciál tohto softvéru sa však ukrýva v offline programovaní, pretože umožňuje rýchlejšiu implementáciu výroby nových typov výrobkov do už existujúcej výrobnej linky, predprípravu programov, overovanie dosahu jednotlivých robotov osadených vo virtuálnej stanici a simuláciu pracoviska do ľubovoľných detailov. Šetrí čas i financie pri zavádzaní nových modelov do výroby. Zároveň však ponúka rozšírenia ArcWelding, Cutting, Machining, Tending, Painting, Palletizing alebo Picking PowerPac, ktoré urýchľujú a uľahčujú používateľovi prípravu robotizovanej stanice.
SmartComponenty
RobotStudio okrem programovania robotov umožňuje používateľovi vytvárať a simulovať procesy okolitých zariadení prostredníctvom SmartComponentov. Ide o prvky, ktoré umožňujú vytvárať logické obvody so schopnosťou realizovať cyklické procesy. Tie sa môžu riadiť výstupnými signálmi z kontroléra robota alebo fungovať v plne automatizovanom režime. SmartComponenty disponujú digitálnymi, analógovými alebo skupinovými vstupmi a výstupmi.
Kde použiť SmartComponent?
- Mechanická alebo vákuová uchopovacia hlavica, ktorej úlohou je premiestňovať objekty v simulovanej stanici.
- Riadenie mechanizmu so spätnou väzbou, napríklad otváranie dverí CNC stroja a následné overenie ich pozície.
- Cyklické generovanie alebo vymazávanie objektov zo stanice, ktoré sa často spájajú s dopravníkovými systémami.
- Tvorba dopravníkového systému s funkciou zastavenia posunu objektu v určitej pozícii a opätovného rozbehu alebo zabezpečenia presnej polohy objektu na dopravníku prostredníctvom polohovacieho zariadenia.
- Snímanie prítomnosti objektov a vyhodnocovanie ich pozícií alebo natočení a následné odosielanie tejto informácie do kontroléra robota.
- Nasimulovanie gravitačného stola s cieľom zabezpečenia presnej pozície objektu.
- Tvorba pracovnej hlavice, ktorej činnosť zahŕňa meranie vzdialenosti.
- Tvorba svetelných závor alebo iných senzorických prvkov stanice.
Prostredníctvom SmartComponentov sa dá vytvoriť plne funkčná kópia reálneho pracoviska so všetkými logickými, vstupno-výstupnými a pohybovými parametrami. V takomto virtuálnom pracovisku možno otestovať program robota, kontrolovať poradie jednotlivých operácií alebo optimalizovať čas cyklov. Umožňujú nasimulovať logiku PLC systémov, ktoré disponujú matematickými a logickými operáciami. Ďalšou užitočnou možnosťou je vytváranie parametrických objektov, napríklad bezpečnostného oplotenia stanice, podstavca robota, pracovnej hlavice a iných. Pomocou SmartComponentov možno vytvoriť simuláciu triedenia rôznych objektov.
Jednotlivé SmartComponenty v stanici sa môžu navzájom poprepájať signálmi. Samozrejmosťou je možnosť prepojenia robota so SmartComponentmi v režime master – slave. Okrem prepájania signálov možno navzájom prepájať vlastnosti jednotlivých blokov. Robot tak môže meniť rýchlosť dopravníkov, otvárať a zatvárať uchopovacie pracovné hlavice na požadovanej hodnote alebo môže snímač na konci dopravníka poskytnúť informáciu o tom, aký objekt sníma.
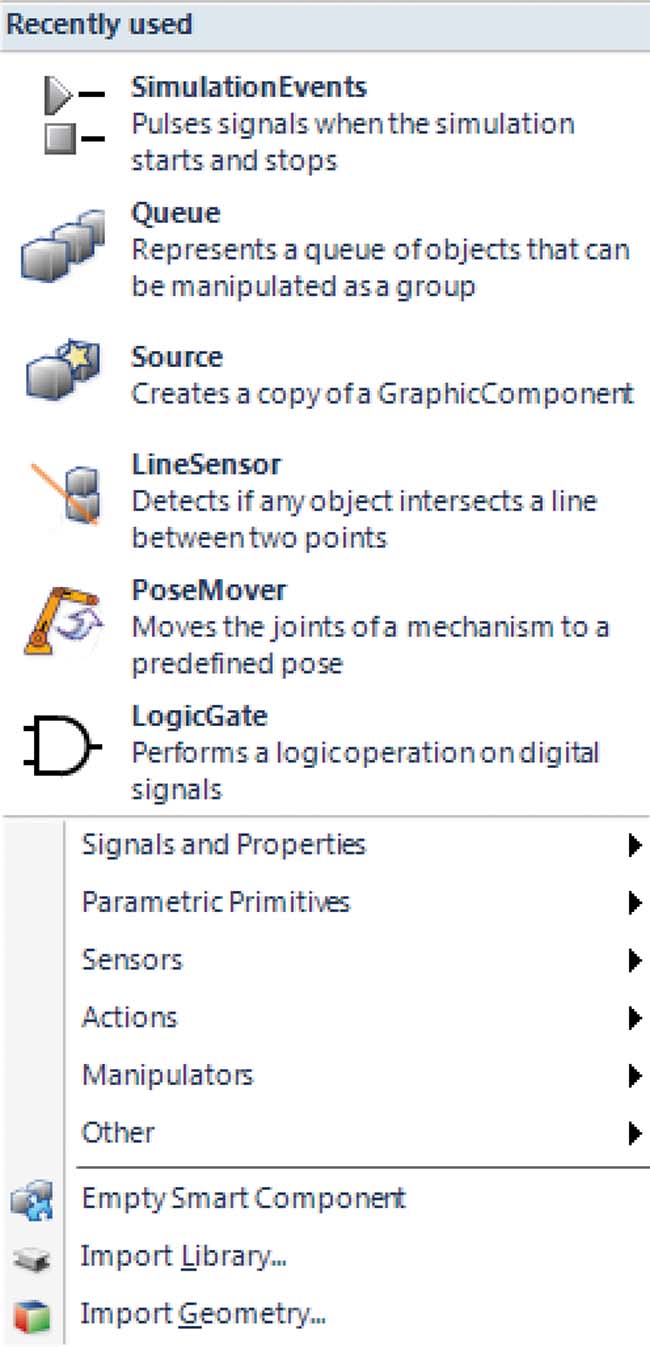
Programovanie vnútornej logiky SmartComponentov sa realizuje prostredníctvom funkčných blokov, ktoré sú rozkategorizované do niekoľkých skupín:
- Signals and Properties – spracovanie vstupných signálov a vlastností a ich následné matematické alebo logické vyhodnotenie.
- Parametric Primitives – tvorba parametrických objektov.
- Sensors – skupina obsahujúca rôzne typy snímačov na detegovanie objektov alebo kolízií.
- Actions – skupina akčných prvkov zahŕňajúca prichytenie – pustenie objektov, vytvorenie nových objektov alebo ich vymazanie zo simulácie, zobrazenie alebo zneviditeľnenie objektov.
- Manipulators – skupina blokov, ktoré umožňujú lineárny alebo krivkový pohyb objektov, prípadne pohyb mechanizmu do zadefinovaných pozícií.
- Other – v tejto časti sa nachádzajú bloky s rôznym zameraním a umožňujú napríklad inicializáciu SmartComponentu, obohatenie simulácie o audiovizuálne prvky alebo vypisujú hlásenia do operátorského okna.
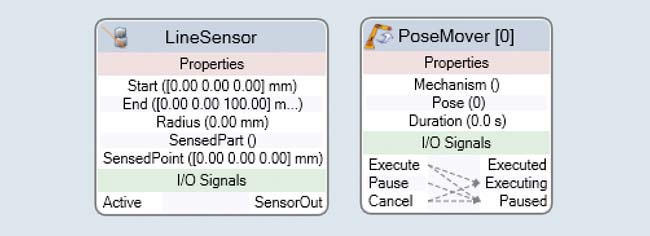
Jednotlivé funkčné bloky možno rozdeliť na dve časti. Vrchná časť (Properties) pracuje s informáciami, ako sú napríklad rýchlosť posunu, pozícia mechanizmu, súradnice a orientácia objektu v priestore, alebo je nositeľom numerickej hodnoty. Spodná časť bloku pracuje výlučne so signálmi. Vlastnosti a signály jednotlivých blokov nemožno kombinovať. V tomto prípade treba použiť funkčný blok Converter nachádzajúci sa v časti Signals and Properties.
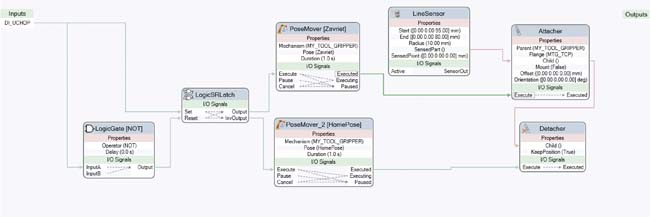
Vysvetlenie princípu funkčnosti schémy vákuového grippera
Na obrázku je zobrazená funkčná schéma uchopovacej pracovnej hlavice. Na jej vstupe sa nachádza diskrétny signál DI_uchop, ktorý je riadený kontrolérom robota a môže nadobúdať hodnoty 0 a 1. Tento signál je zapojený priamou cestou do bloku LogicSRLatch na vstup SET. Naopak nepriamou cestou (cez blok LogicGate – logická brána, ktorá je nastavená na logickú operáciu NOT) je signál napojený na vstup RESET bloku LogicSRLatch. Týmto typom zapojenia možno ovládať uchopovaciu hlavicu prostredníctvom jedného signálu. Z výstupu OUT bloku LogicSRLatch vedie signál k funkčnému bloku Attacher, ktorý v simulácii zabezpečuje prichytenie objektu k pracovnej hlavici robota. Tento blok obsahuje dve vlastnosti, ktoré musia byť vyplnené. Prvá vlastnosť označuje model v simulácii, ku ktorému budú objekty prichytávané (PARRENT), druhá vlastnosť poukazuje na objekty, ktoré sa majú k nástroju prichytiť (CHILD).
Blok LogicSRLatch obsahuje ešte výstup INVOUT. Ide o invertovanú hodnotu výstupu a tento signál je prepojený s blokom DETTACHER. Ten obsahuje iba jednu vlastnosť, ktorá sa, ako vidieť v schéme, môže dediť z bloku ATTACHER. Posledným krokom k zapojeniu schémy je vloženie snímača. Ten je umiestnený do oblasti pracovnej hlavice, ktorá je v bezprostrednej blízkosti s prenášaným objektom vo chvíli procesu uchopenia. Snímač zabezpečuje aktuálnu informáciu o objekte a sprostredkúva ju bloku ATTACHER. Snímač treba umiestniť tak, aby čiastočne vytŕčal z objektu. Ideálne je vypnúť pracovnej hlavici vlastnosť detegovania snímačom a snímač umiestniť tak, aby bol čiastočne do nej vnorený.
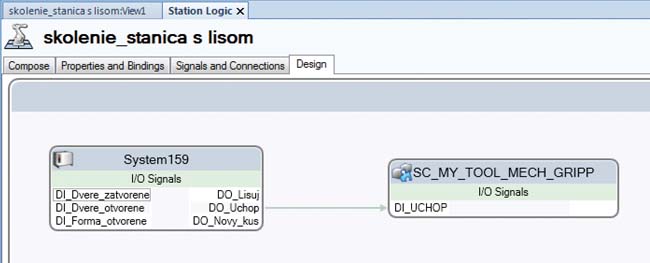
Na prepojenie kontroléra robota a SmartComponentu je nutné v časti StationLogic prepojiť výstupný signál robota so vstupným signálom Smartcomponentu.
