











Už pri vstupe na výstavisko MesseMünchen vás uvíta nemecká precízna organizácia. O návštevníka výstavy je postarané po každej stránke, od prístupu k informáciám až po gastronomické služby. Pred vstupom na výstavisko zaujme návštevníkov svojou vonkajšou expozíciou priestorovo najväčší vystavovateľ Fanuc. V halách A1 a A2 boli sústredení vystavovatelia zaoberajúci sa predovšetkým montážnou a manipulačnou technikou. Tomu zodpovedali aj prezentované exponáty a riešenia.
V týchto halách bola riešená predovšetkým problematika polohovania s čo najväčšou presnosťou od rôznych podávačov až po manipulačné roboty. Predstavené boli exponáty od potravinárskeho priemyslu až po automobilový priemysel. Štandardne, najmä pre svoju rýchlosť, zaujali triploidné štruktúry manipulačných robotov. Väčšinou však išlo o štandardné priemyselné riešenia. Z hľadiska inovatívnych riešení boli zaujímavejšie haly B1, B2 a B3, ktoré boli zamerané predovšetkým na robotiku. Okrem štandardných priemyselných robotov bolo možné zhliadnuť viaceré zaujímavé exponáty:
- Robot M-2000iA od spoločnosti Fanuc s nosnosťou až 1 350 kg (obr. 1), čo ho robí najväčším priemyselným robotom na svete. Jeho variant s predĺženým ramenom M-2000iA900L s nosnosťou 900 kg má horizontálny dosah 4,7 m a vertikálne je schopný zdvihnúť bremeno až do výšky 6,2 m.
- Robot TP80 od Stäubli (obr. 2), ktorý je schopný preniesť bremeno do hmotnosti 0,1 kg až 200-krát za minútu pri postupnosti pohybov zdvih 25 mm – vodorovný posun 300 mm – pokles 25 mm – a späť (1 kg bremeno pri cykle 50-700-50 prenesie 95-krát za minútu).
- Humanoidný robot Justin od Fraunhofer IPA (obr. 3) vyznačujúci sa skvelou dynamikou a takmer nulovým dopravným oneskorením pri haptickom riadení pomocou operátora.
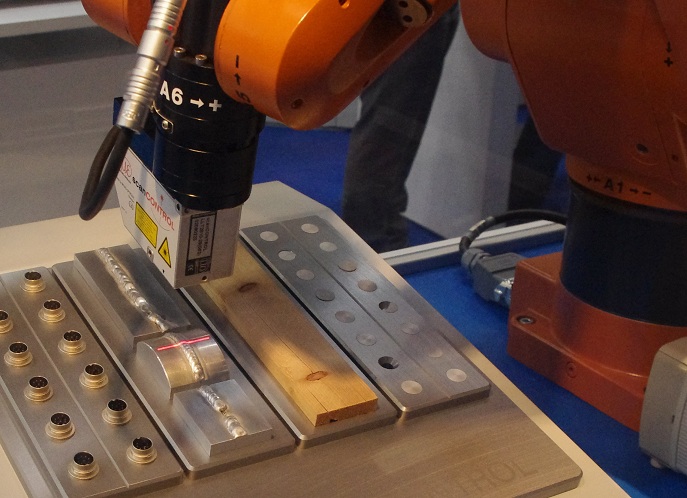
Okrem týchto výnimočných exponátov sa v robotických halách nachádzali predovšetkým zváracie a manipulačné roboty. Na výstave bolo možné zhliadnuť mnoho zváracích technológií. Išlo najmä o technologické hlavice na bodové a oblúkové zváranie a rôzne spájkovacie metódy používané v automobilovom priemysle pri produkcii karosérií vrátane dvier, kapotáže, tlmičov a výfukových systémov. Aj keď väčšina zváracích robotov len automaticky vykonávala predprogramované inštrukcie, našli sa aj roboty schopné pracovať s vyššou inteligenciou.
Tieto roboty obsahovali predovšetkým snímače schopné snímať zvar aj počas procesu zvárania, a teda kvalitnejšie riadiť celý výrobný proces (obr. 4). Snímače možno využiť aj pri kontrole zvaru. Trendom v robotike sa pomaly, ale isto stávajú mobilné manipulátory (obr. 5), čo potvrdzovali takmer všetky významnejšie robotické firmy (Fanuc, Kuka, ABB, Stäubli, Schunk apod.). Na prednáškach fóra Automatika bol dokonca predstavený mobilný manipulátor MM-800 od spoločnosti Neobotix, ktorý sa práve testuje v prostredí továrne Audi. Dôležitým problémom, ktorý treba riešiť pri týchto systémoch, je otázka lokalizácie a bezpečnosti. Lokalizácia sa zatiaľ rieši vo forme umelých značiek v prostredí.
Napriek tomu takéto roboty dokážu nahradiť človeka nielen v oblasti manipulácie s predmetmi na statickom mieste, ale aj pri presúvaní týchto predmetov na väčšie vzdialenosti. Z hľadiska bezpečnosti ide predovšetkým o nedeštruktívne pôsobenie v prostredí a kooperáciu s pracovníkmi. Navyše často sa pracuje s technológiami, ktoré môžu ohroziť ľudské zdravie (napr. zváranie). Vzhľadom na predvedené výkony týchto robotov na výstave možno predpokladať, že sa stanú žiadanou automatizačnou technikou umožňujúcou aj kooperáciu výrobných činností s pracovníkmi. Treba však vyriešiť otázku bezpečnosti koordinácie pracovníka s takýmto robotom. Na výstave bol len jeden exponát predstavujúci takúto spoluprácu, a to od spoločnosti ABB (obr. 6).
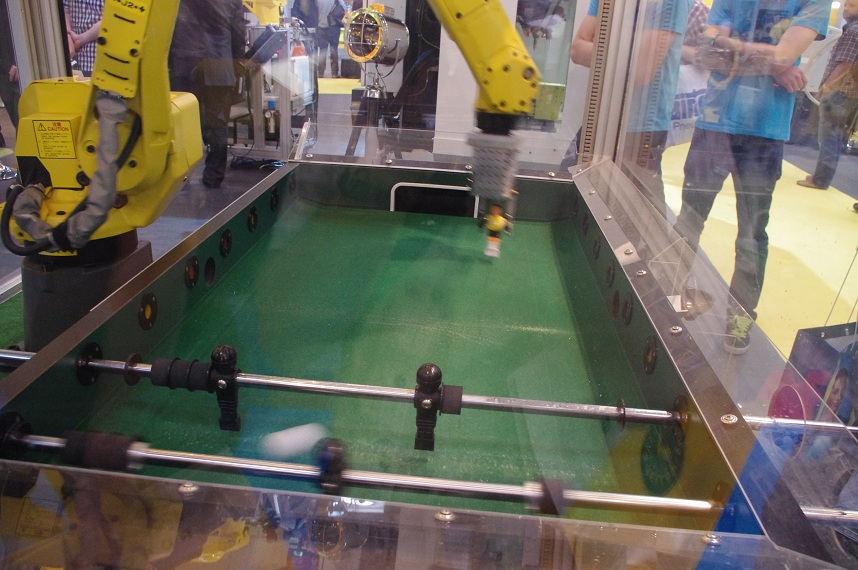
Tá predstavila svoj koncept dvojramenného robota kooperujúceho s človekom pri montáži a kompletizácii menších výrobkov. Pre návštevníkov boli, samozrejme, pripravené aj skôr zábavné exponáty, ako napríklad robot od Robohow pripravujúci pukance. V stánku Fanuc si bolo možné zahrať s robotom stolný futbal alebo basketbal a v stánku Denso stolný hokej. Asi netreba zdôrazňovať, kto z hráčov bol vo väčšine prípadov víťazom. Medzi zaujímavé exponáty patril robot, ktorý otváral fľaše, nalieval a ponúkal hostí občerstvením od firmy Heitec. Žiaľ, robot bol naprogramovaný len manuálne na predpripravené polohy a nešlo teda o žiadne riadenie sily.
Z hľadiska riadenia sily bola výstava viac-menej sklamaním. Drvivá väčšina vystavovateľov sa sústredila len na riadenie polohy a jej derivácií. Z oblasti mobilnej robotiky zaujali predovšetkým roboty od DLR, Fraunhofer IFF a ServiceRobotik. Čoraz častejšie sa pri mobilných robotoch objavuje snímač typu Kinect, ktorý adekvátne nahrádza iné snímače (diaľkomery alebo vizuálne systémy) za oveľa nižšiu cenu. Tento snímač bol tak isto v mnohých prípadoch použitý pri riadení robotov pomocou gest (obr. 7). Z oblasti snímacej technológie sa čoraz viac začínajú uplatňovať komplexné 3D snímače na kontrolu kvality alebo detekciu predmetov v priestore.
Na celom výstavisku nebolo takmer možné nájsť 2D snímač tohto typu. Takéto typy snímačov jednoznačne zvyšujú kvalitu regulácie a riadenia, polohovania alebo už spomínanej kontroly kvality. Výstava ponúkla nielen štandardné, ale aj inovatívne riešenia z oblasti robotiky a automatizácie. Cieľom vystavovateľov bolo ponúknuť riešenia zamerané na miniaturizáciu, bezpečnosť a spoľahlivosť, flexibilitu, kvalitu, interakciu s ľuďmi, manipulačnú techniku, strojové videnie a nové oblasti aplikácie technológií.
Tento článok vznikol vďaka podpore projektu Autoweldlink (ITMS 26240220033).
doc. Ing. František Duchoň
PhD. Ing. Andrej Babinec
Ing. Marian Kľúčik
Slovenská technická univerzita v Bratislave
Fakulta elektrotechniky a informatiky
Ústav riadenia a priemyselnej informatiky
