




Kľúčové faktory
Automatizované prevádzky a procesy súčasnosti vyžadujú zahrnutie najnovších technologických trendov, akými sú aj kamerové systémy či systémy strojového videnia všeobecne. Rozpoznávanie, detekcia a spracovanie obrazových informácií sa preto stalo akýmsi štandardom a nevyhnutnou súčasťou aplikačného riešenia ako celku. Iniciatívy vznikajúce na základe znižovania úspor a požiadavky trhu práce kladú dnes nové požiadavky na zlepšenie procesov [1]. Práve narastajúca flexibilita procesov núti výrobcov dosahovať rýchlu a presnú odozvu na rýchlo sa meniace požiadavky zákazníkov. Alternatívne spôsoby realizácie úloh vyžadujú napr. kontrolu tvarovo odlišných vlastností výrobkov a polotovarov či zisťovanie materiálových chýb. Nastupujúci trend digitalizácie i samotný inovačný potenciál v tejto oblasti je značný a stavia na základoch novodobej IT generácie, vývoji umelej inteligencii či prediktívnej údržby.
Preto sme iniciovali a smerovali naše výskumné aktivity do prostredia 2D kamerových systémov ako kľúčovej technológie pre automatizáciu. Ich aplikačné nasadenie na báze inteligentnej detekcie, diagnostiky porúch a optimalizácie v kombinácii s využitím znalostných systémov videnia (prostredníctvom genetických algoritmov či neurónových sietí) dnes už dokáže efektívne vyriešiť každý problém pokročilej aplikačnej štruktúry. Okrem toho, induktívne učenie v kombinácii s inteligenciou automatizovaných pracovísk vedie každý výrobný systém k prepojiteľnosti a digitalizácii [2].
Systémy strojového videnia všeobecne ako jedna z najpopulárnejších technológií prinášajú vysokú flexibilitu, najmä čo sa týka zberu a spracovania dát o prebiehajúcom procese. Dokážu sa prispôsobiť rôznym situáciám a nastaveniam tak, aby efektívne získali informácie zo snímaného obrazu bezkontaktnou optickou formou. Často nahrádzajú ľudský faktor, keďže niektoré pracoviská sú lokalizované mimo prirodzeného prostredia človeka, a eliminujú chyby pri meraní spôsobené ľudskými očami. Preto je ich nasadzovanie dôležité a výrazným spôsobom prispieva k zvyšovaniu inteligencie procesov na pracovisku. Zároveň podporuje snahy o plnú automatizáciu výroby a štandardy bez účasti človeka.
V ďalších častiach príspevku preto chceme ukázať využitie zabudovaných softvérových funkcií vybraného 2D kamerového systému s externou vyhodnocovacou jednotkou, a to na príklade troch nezávislých softvérových modulov. Konečným cieľom je experimentálne testovanie a verifikácia spoľahlivosti detekcie obrazu na príklade reálneho testovacieho objektu (ložisko v puzdre). V nadväznosti na získané obrazové informácie budeme vyhodnocovať maximálnu veľkosť objektu, polohovú orientáciu či pomer strán.
Existujúce riešenia
Treba konštatovať, že na trhu sa momentálne vyskytuje celý rad rôznych typov kamerových systémov, počnúc drahšími 3D riešeniami až po cenovo dostupnejšie 2D kompakty s integrovanou jednotkou na spracovávanie a vyhodnocovanie. Samotný proces nastavovania snímania využíva obvykle intuitívne sprevádzanie používateľa pomocou kontrolných krokov v jednotlivých nástrojoch (moduloch) kamerového systému.
K dispozícii je rad využívaných algoritmov, ako napr. hľadanie, znaky, farba, hrana, plocha a mnohé ďalšie. Existujúce riešenia detegujú veľkosť a polohu kontrolovanej oblasti, pričom zároveň spúšťajú meranie. Takmer všetky kamerové systémy sa vyznačujú vysokou rýchlosťou a okamžitou spätnou väzbou. Ich štandardnou súčasťou je osvetlenie a objektívy, ktoré sú zväčšia integrované priamo na šasi kamerového systému. V zásade možno tieto produkty rozdeliť na čiernobiele a farebné verzie. Náročnejšie prakticky orientované aplikácie vyžadujú snímanie skutočných farieb vo vysokom rozlíšení, funkcie na trojrozmerné zobrazovanie a jednoduchosť ovládania. Najrýchlejšie modely kamerových systémov pritom dokážu spracovať viac ako 80 snímok za sekundu a majú dotykové ovládanie s automatickými funkciami. Ich externé vyhodnocovacie jednotky dokážu pripojiť štyri a viac kamerových systémov naraz, čo rozširuje možnosti ich nasadenia.
Čo sa týka konštrukčnej časti, disponujú odolným hliníkovým telom (puzdrom) s utesnenými konektormi a ochranným krytom na objektív. Sú tak pripravené na nasadenie aj do extrémnych podmienok. Softvér a jeho ovládanie sa vyznačujú veľkým výberom základných, ale aj pokročilých funkcií, pričom nezáleží na tom, či vytvárame novú aplikáciu alebo dopĺňame existujúcu. Samozrejmosťou sú možnosti obmedzenia používateľov (editácia, prehliadanie), aby sa predišlo úniku citlivých informácií. Ďalšou užitočnou vlastnosťou je odosielanie získaných údajov na vzdialené počítače, čiže existuje pohodlný vzdialený prístup k implementovanému hardvéru, napr. z kancelárie či iného vhodného stanovišťa.
Detekcia a spracovanie
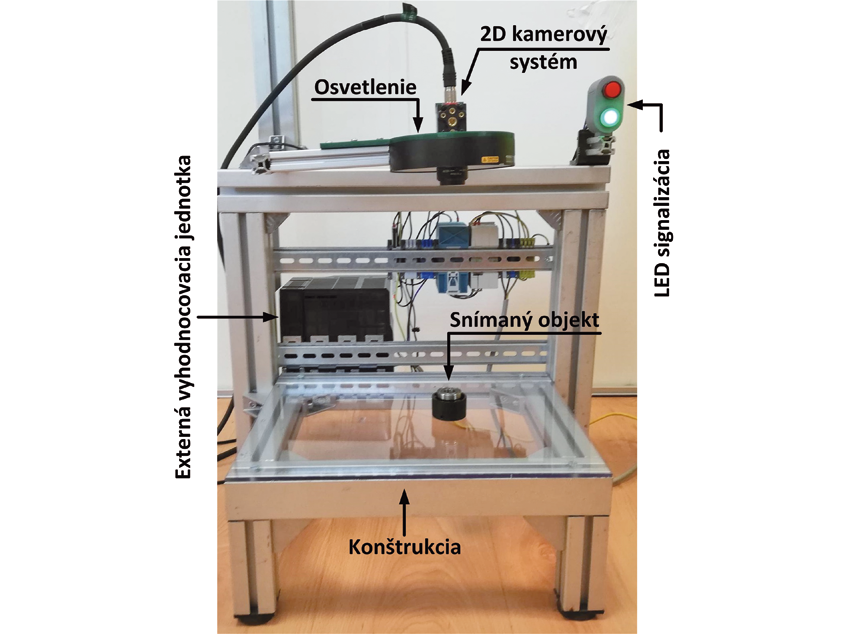
Aj keď detekcia a spracovanie obrazových informácií v zornom poli sú vo výsledku založené na geometrických veličinách (poloha, dĺžka, plocha), kľúčovým faktorom v našom prípade je ostrosť získaného obrazu, správna vzdialenosť 2D kamerového systému od snímaného objektu a vhodný objektív s vysokým rozlíšením a nízkym skreslením [3]. Experimentálne testovanie a verifikácia spoľahlivosti detekcie obrazu sa vyvíjali ako modulárne testovacie riešenie na báze hardvérovej prepojiteľnosti komponentov (KEYENCE), softvérovej podpory i nastavenia parametrov komunikácie na báze TCP/IP protokolu (obr. 1).
Predstavované aplikačné riešenie (obr. 2) využíva tri nezávislé softvérové moduly ako funkcie vysoko výkonnej externej jednotky, ktorá zabezpečuje spracovanie získaných obrazových informácií. Samozrejme, táto jednotka obsahuje nepreberné množstvo modulov ukrývajúcich rad pokročilých algoritmov schopných paralelne vyhodnocovať získané informácie. Nie je však cieľom tohto príspevku oboznamovať čitateľa s jej jednotlivými funkciami, schopnosťami či možnosťami.
Tieto údaje si vie čitateľ dohľadať z katalógových zdrojov výrobcu. Proces parametrizácie tejto aplikačnej úlohy, testovanie i samotná verifikácia spoľahlivosti detekcie snímaného objektu závisia od nasledujúceho postupu:
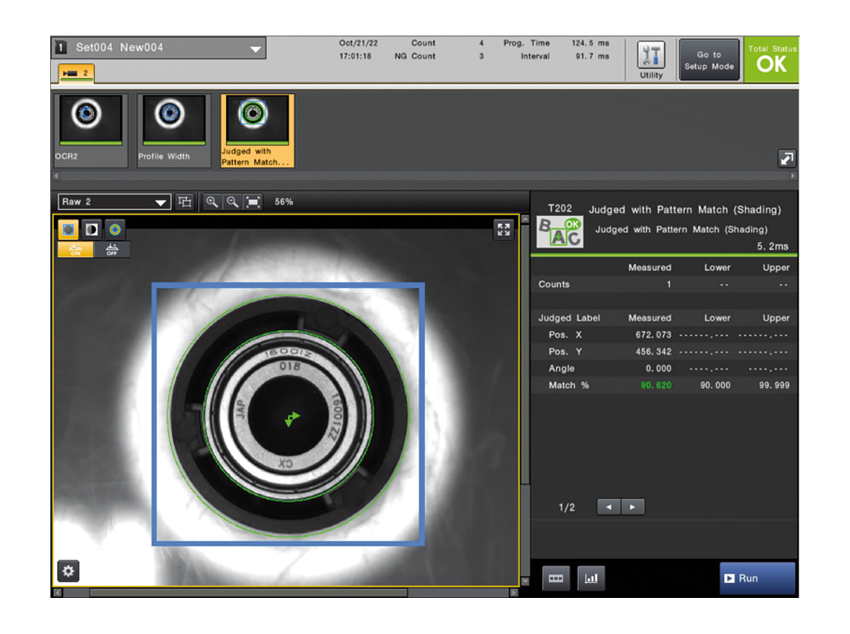
1. Využitie porovnávacieho algoritmu (Pattern Match)
Tento softvérový modul je základom na porovnanie uloženého (správneho a dopredu zadefinovaného tvaru) vzoru s nasnímaným obrazom v zornom poli 2D kamerového systému (obr. 3).
Činnosť je realizovaná na základe vopred zaregistrovaného vzoru pri následnom porovnávaní získaného obrazu s určitou toleranciou (v našom prípade 90 – 100 %). Jednotlivé kroky vyžadujú najprv nahratie referenčného obrazu snímaného objektu. Potom sa obvykle nastaví región snímania na objekte, extrahujú sa farby a vykoná sa zlepšenie ostrosti obrazu. Finálnym krokom algoritmu zabudovaného softvérového modulu je určenie uhla pootočenia (+/-) objektu. Avšak v našom prípade, keď je snímaný objekt kruhového tvaru, to stráca význam.
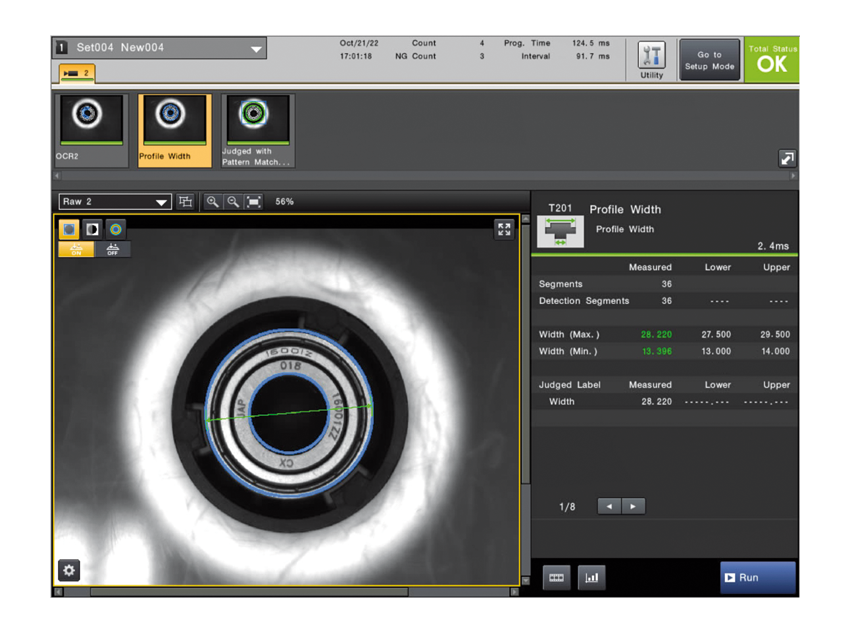
2. Využitie meracieho algoritmu (Profile Width)
Základom toho softvérového modulu je realizácia súčasného merania maximálnej a minimálnej šírky snímaného objektu v zadefinovanom rozsahu. Princíp na pozadí bežiaceho algoritmu vyhodnocuje vonkajší priemer hrany (v kruhovom tvare) snímaného objektu na základe detekcie dvoch protiľahlých segmentov.
Finálnym krokom algoritmu zabudovaného softvérového modulu je určenie veľkosti kružnice na vonkajšom (v našom prípade je referenčná hodnota priemeru rovná 28,5 mm) i vnútornom priemere (v našom prípade je referenčná hodnota priemeru rovná 13,5 mm).
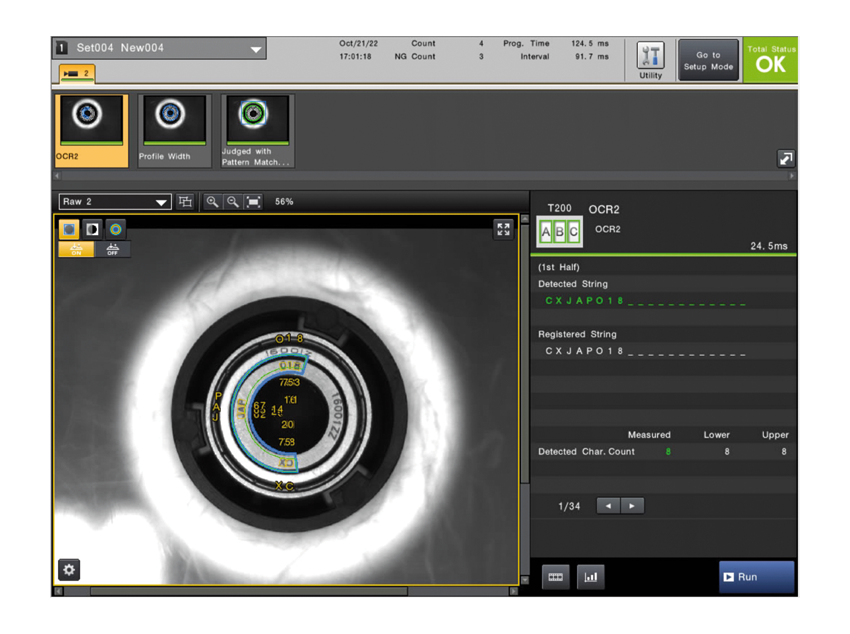
3. Využitie detekčného algoritmu (OCR2)
Na identifikáciu cieľových znakov bol využitý detekčný algoritmus, ktorý pracuje so získaným obrazom podľa dopredu zadaných podmienok (obr. 5). Používateľ musí nastaviť región, ktorý má byť prečítaný, font a farby znakov (napr. T200, zelená) či smer rozpoznávania znakov (sprava doľava al. naopak).
Následne sa informácia o reťazci extrahuje a porovnáva s referenčným údajom uloženým ako vzor.
Záver
Pri vyhodnocovaní spoľahlivosti detekcie porovnávacím softvérovým modulom Pattern Match sme dosiahli 100 % úspešnosť merania pri detekcii zhody na úrovni 90 % (spodná úroveň) pri hornom rozsahu 100 %. Spoľahlivosť detekcie meracím softvérovým modulom Profile Width bola pre minimálnu hodnotu nastavená v rozmedzí 13 až 14 mm priemeru (vnútorný krúžok). Jej maximálna hodnota bola nastavená v rozmedzí 27,5 až 29,5 mm priemeru (vonkajší krúžok). Pri nastavení týchto dvoch parametrov modulu boli vždy detegované všetky rozmery objektu správne (100 %). Čo sa týka detekčného softvérového modulu OCR2, pri 100 cykloch detekcie obrazu sme dosiahli mieru úspešnosti 89 %, čo predstavuje 11 neúspešných pokusov. Zvýšenie spoľahlivosti jednotlivých softvérových modulov dosiahneme stabilnejšími svetelnými podmienkami na testovanom pracovisku, lepším objektívom a kvalitnejším kamerovým snímačom.
Obsahovo je prezentovaný výskum predstavený ako typicky mechatronický prístup, kde treba využiť dostupné komunikačné protokoly, vybrať a parametrizovať štruktúru softvérových modulov na spracovanie obrazových dát, ako aj konštrukčne dobudovať modulárne experimentálne zariadenie nato, aby bolo možné výskum realizovať. Základným predpokladom bolo hardvérové i softvérové prepojenie jednotlivých zariadení a využitie zabudovaných funkcií a algoritmov 2D kamerového systému.
Poďakovanie
Tento príspevok vznikol vďaka podpore v rámci projektu VEGA 1/0169/22 Nové metodiky prístupov k dátam automatizovaných a robotizovaných pracovísk.
Literatúra
[1] „Oči“, ktoré dohliadajú na kvalitu. In: ATP journal, 2022, č. 9. ISSN 1335-2237.
[2] Ste malý alebo stredný podnik a potrebujete sa posunúť v digitalizácii? In: ATP journal, 2023, č. 4. ISSN 1335-2237
[3] KEYENCE vision systems and sensors. [online]. Citované 4. 5. 2023.
Ing. Jaroslav Romančík
Bc. Ondrej Majerčák
Ing. Róbert Rákay, PhD.
doc. Ing. Marek Vagaš, PhD.
Katedra priemyselnej automatizácie a mechatroniky
Strojnícka fakulta
Technická univerzita v Košiciach
Park Komenského 8
042 00 Košice
Tel.: +421 55 602 3163
marek.vagas@tuke.sk
