


Bezkomutátorové jednosmerné motory
Začiatky vzniku jednosmerných motorov sa datujú do obdobia prác Michaela Faradaya a Josepha Henryho, ako aj Andrewa Gordona v 40. rokoch 18. storočia. Tí ukázali, že prechodom prúdu cez drôt v magnetickom poli sa vytvorí sila. Napriek týmto skorým objavom trvalo až do 80. rokov 19. storočia, kým sa motory začali široko využívať na komerčnom základe.
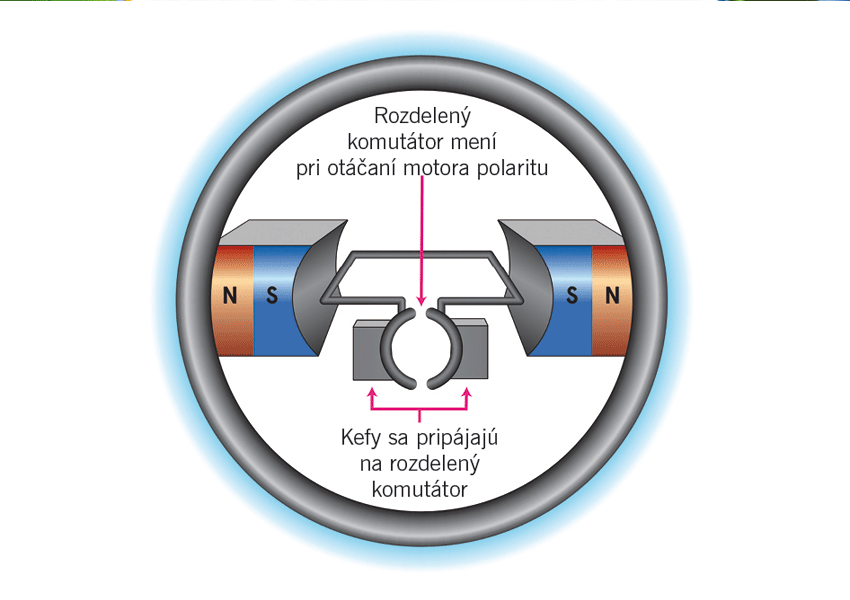
Prvé motory boli komutátorové (kefové). Dôvodom bolo, že polaritu prúdu treba obrátiť vždy, keď sa motor otočí o 180°, aby sa rotácia udržala v rovnakom smere. Kefy sú v kontakte s deleným komutátorom (obr. 1), čo umožňuje zmenu smeru toku prúdu. Mechanické kontakty realizované kefami však majú za následok vznik výraznej elektromagnetickej interferencie (EMI) a iskier a zníženú životnosť v dôsledku erózie kefy a komutátora.
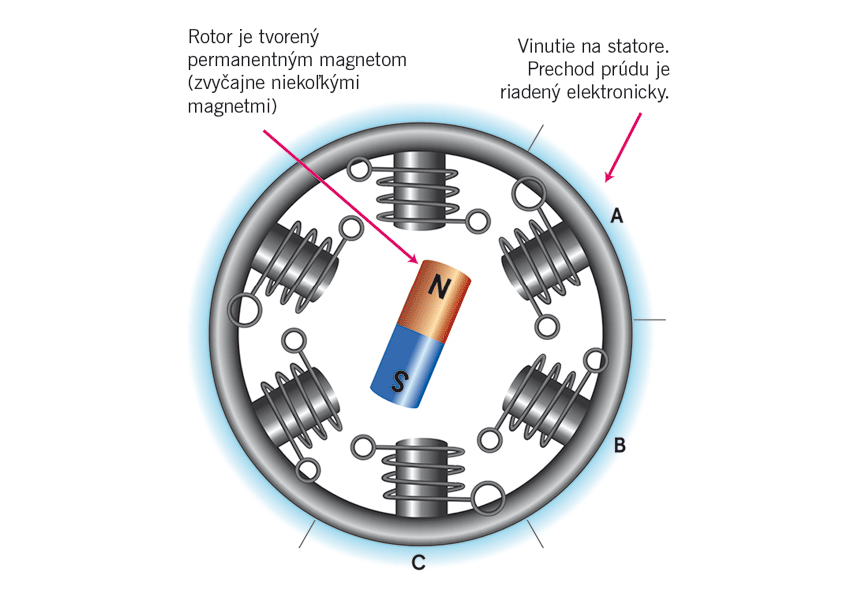
Rozvoj polovodičovej technológie umožnil T. G. Wilsonovi a P. H. Trickeymu vyvinúť v roku 1962 bezkomutátorový jednosmerný motor, ktorý na komutáciu využíval elektroniku, čím odstraňoval nevýhody používania kief a ponúkol možnosť vyššieho pomeru krútiaceho momentu a hmotnosti a vyššej účinnosti. BLDC motor používa rotor s permanentnými magnetmi a stator pozostávajúci z elektromagnetov, ktorých polarita je elektronicky prepínaná na pohon rotora (obr. 2). BLDC motory môžu byť konštruované v jedno-, dvoj- a trojfázových konfiguráciách, pričom trojfázové sú najobľúbenejšie. Dnes sú BLDC motory preferovanou technológiou, ktorá zlepšuje výkon mnohých zariadení, od počítačových pevných diskov a priemyselných robotov až po elektrické vozidlá a ventilátory.
Riadenie BLDC motorov
Keďže komutácia je riadená elektronicky, musí existovať nejaký spôsob monitorovania polohy rotora. Tradične sa to dosahovalo pomocou snímača Hallovho efektu. Ak je však známy presný uhol natočenia, riadenie motora môže byť ešte presnejšie. Alternatívne možno prúd pretekajúci v každom z vinutí merať pomocou bočných rezistorov. Aby sa zabezpečilo, že doska na overenie koncepcie bude použiteľná pre čo najviac aplikácií, spoločnosť Renesas sa rozhodla implementovať odpory a použiť snímač polohy v projektoch, kde je potrebné presnejšie riadenie.
Na riadenie BLDC motorov sa používa celý rad rôznych algoritmov. Moderné aplikácie majú tendenciu používať na pohon motora sínusové priebehy, pretože sú efektívnejšie, zabezpečujú hladký krútiaci moment a sú presnejšie pri nízkej rýchlosti ako lichobežníkové priebehy využívajúce šírkovo-impulznú moduláciu (PWM). Použitie sínusových výstupných kriviek a výpočty uhla, ak sa používajú snímače polohy, kladú na mikroprocesor v systéme riadenia veľké požiadavky na výkon.
Výber motora a MOSFET tranzistorov
Kľúčovým komponentom v systéme je jednoznačne motor, čo je zvyčajne prvý produkt, ktorý sa má vybrať. Primárnymi kritériami výberu sú dostupné napätie, požadovaná rýchlosť otáčania, krútiaci moment a výkon, hoci niekedy sú dôležité aj iné faktory, ako napríklad veľkosť motora. Dnes väčšina BLDC motorov používa trojfázovú konfiguráciu.
V koncepte spoločnosti Renesas bol vybraný 24 V motor. Keď tento motor využíva 24 V zbernicu a zastaví sa pri plnej rýchlosti, vygeneruje spätné elektromagnetické pole 24 V, čo znamená, že výkonové tranzistory MOSFET používané na pohon motora potrebujú minimálne menovité napätie 48 V. Tranzistory tiež musia byť schopné dodávať prúdové špičky, ktoré môžu byť výrazne vyššie ako priemerný prúd. Ideálny je výkonový MOSFET RJK0651DBP, ktorý ponúka menovité napätie 60 V a prúdovú kapacitu 25 A, čo bolo viac než dostatočné pre zvolený motor.
Mikroprocesor nie je schopný riadiť MOSFET priamo, preto boli zvolené ovládače HIP2211 Half-Bridge Gate Drivers. Tieto flexibilné zariadenia ponúkajú široký prevádzkový rozsah napájania od 6 V do 18 V a integrovanú diódu vo vysokonapäťovom obvode.
Výber mikroprocesora
Testovacia doska ponúka možnosť použiť na určenie polohy rotora indukčný snímač polohy alebo bočné odpory. Mikroprocesor používaný v aplikácii riadenia motora BLDC musí ponúkať dobrý výkon, najmä pre výpočty, ktoré sú potrebné na určenie uhlovej polohy rotora. To viedlo k tomu, že sa vývojári rozhodli použiť mikroprocesor s jednotkou s pohyblivou rádovou čiarkou.
Väčšina moderných mikroprocesorov pracuje s napätím 3,3 V, ale v aplikáciách s vyšším rušením to môže byť nevýhoda. Na zabezpečenie odolnej prevádzky sa vývojári rozhodli zvoliť mikroprocesor, ktorý pracuje pri 5 V. Rad RX13T tieto požiadavky splnil a je špeciálne navrhnutý pre aplikácie riadenia motorov. K dispozícii je niekoľko rôznych možností balíka, ako aj 12 KB RAM a výber zo 64 K alebo 128 KB programovej pamäte. Keďže ide o riešenie na overovanie konceptov, veľké programové pamäťové zariadenie bolo zvolené tak, aby eliminovalo akékoľvek obmedzenia algoritmov, ktoré by mohli byť implementované.
Doska je vybavená softvérom na ovládanie motora a môže používať bočné odpory alebo indukčný snímač polohy. Súčasťou je zdrojový kód, ktorý umožňuje optimalizáciu algoritmov a pomáha inžinierom skrátiť čas potrebný na vývoj.
Snímanie polohy
Hoci BLDC motory veľmi často využívajú na poskytovanie údajov o polohe rotora snímače Hallovho efektu, existujú aj iné spôsoby získania týchto informácií. Okrem snímacích odporov obsahuje testovacia doska aj indukčný snímač polohy IPS2200, ktorý ponúka dramatické zlepšenie oproti Hallovým snímačom. Kým tie poskytujú informáciu o polohe s presnosťou 1/3 otáčky, IPS2200 poskytuje presnosť 0,5° meranú počas celej otáčky. Senzor umožňuje určiť absolútnu polohu rotora na rozdiel od resolvera (indukčný snímač pokrývajúci celý uhol natočenia 2π), ktorý by mohol byť schopný ponúknuť presnosť blížiacu sa presnosti snímača – ale nezhodujúcu sa s ňou – a ktorý bude vyžadovať nulový bod na určenie absolútnej polohy.
Zdroj
Konštruktéri zvolili použitie štandardného 24 V napájacieho zdroja s pripojením cez 5 mm konektor (jack), čo v prípade potreby umožňuje bez problémov získať náhradné napájacie zdroje. Hoci vyhotovenie umožňuje dodávať väčší výkon, výber štandardného konektora znamenal, že maximálny prúd, ktorý možno dodať, je 4 A, čo obmedzuje výkon, ktorý možno dodať do motora. Návrhári sa totiž domnievali, že výhody ľahko dostupného napájacieho zdroja prevážili nad výhodami schopnosti napájať väčšie motory, pretože doska na overovanie konceptov nebola navrhovaná na konkrétnu veľkosť motora.
24 V vstup priamo poháňa motor. Ovládače MOSFET však vyžadujú napájanie 6 V až 14 V. Regulátor ISL85413 generuje riadiace napätie 10 V. Toto výkonové zariadenie je viacúčelový synchrónny regulátor, ktorý poskytuje výstupný prúd až 300 mA s vysokou účinnosťou. Jeho implementácia je obzvlášť jednoduchá, vyžaduje málo externých komponentov, a preto je ideálna pre dosku na overenie koncepcie, ako je táto.
Ako už bolo spomenuté, pre mikroprocesor sa zvolila napájacia zbernica 5 V, aby sa zvýšila hranica odolnosti proti rušeniu a zabezpečila odolná prevádzka. Požiadavka na nízku hodnotu prúdu umožnila použiť ISL80410, regulátor LDO napájaný z 10 V zbernice. To zabezpečilo plynulé napájanie mikroprocesora.
Ďalšie voľby vykonané počas návrhu
V rámci návrhu vyhotovenia dosky bolo pridané USB pripojenie, ktoré umožňuje zbierať dáta a ovládať motor z osobného počítača. Mikroprocesor neobsahuje USB ovládač, preto bola táto funkcionalita získaná pripojením pomocného mikroprocesora RL78/G1C. Použitie samostatného zariadenia na pripojenie USB znamenalo, že návrhári mohli použiť optický oddeľovací člen na ochranu počítača v prípade poruchy dosky. To je mimoriadne dôležité, keď sa doska výkonovej elektroniky používa na vývoj.
Štvorvrstvová doska plošných spojov bola zvolená tak, aby poskytovala dobrý kompromis medzi cenou a veľkosťou. Prvky umiestnené len z jednej strany umožnili nákladovo efektívnejšiu výrobu. Všimnite si, že balenie, ktoré možno použiť, je určené aj veľkosťou dosky plošných spojov.
Konečný systém
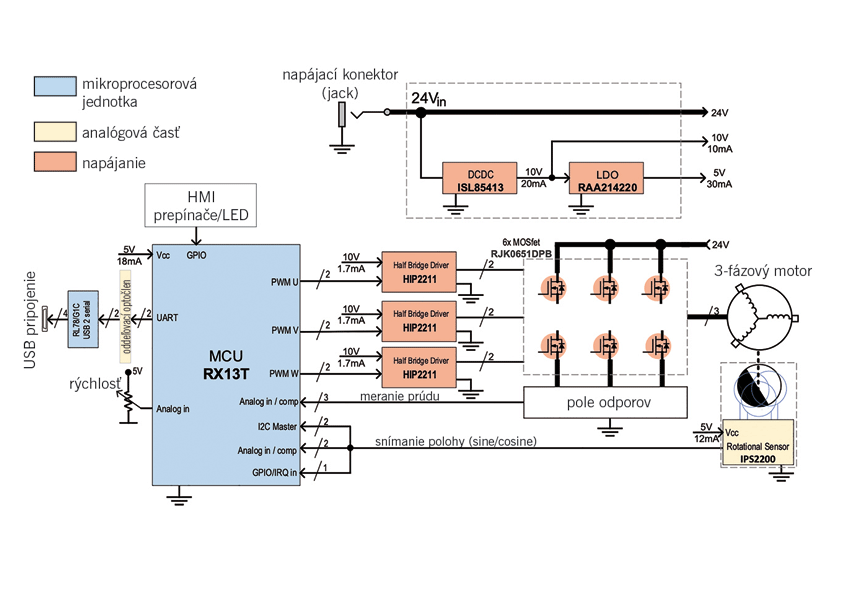
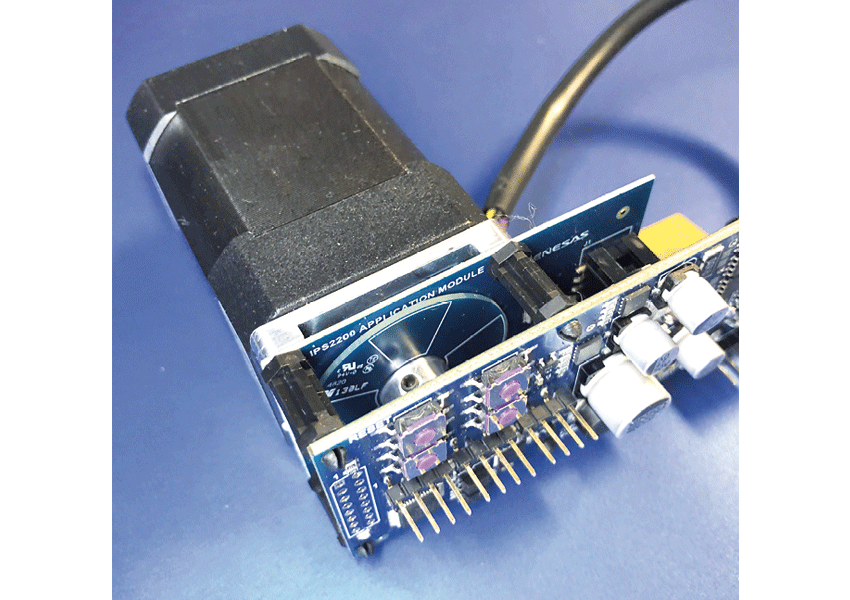
Konečná bloková schéma a samotné zariadenie (obr. 3a, 3b) sa v praxi ukázali ako cenný a flexibilný nástroj, ktorý pomáha technikom pracujúcim na aplikáciách od riadiacich prvkov pre simulátory riadenia automobilov a lietadiel až po elektrické náradie a robotické kosačky na trávu pri vývoji efektívnych riešení riadenia BLDC motora.
Aj keď sa kompromisy pri výbere komponentov v aplikáciách môžu pri jednotlivých doskách na overovanie konceptov líšiť, základné rozhodnutia o návrhu sú zvyčajne rovnaké. Poskytnutím dobre premysleného riešenia pomohol Renesas zákazníkom skrátiť čas potrebný na uvedenie na trh a umožnil efektívne riešenie problémov v oblasti riadenia BSDC motorov.
Simon Meadmore
globálny vedúci manažmentu dodávateľov a produktov, Farnell
www.farnell.com
