



Obr. Kartézsky robot má riadenie, ktoré umožňuje operátorom bezpečne vstúpiť do priestoru stroja, aby naučil robot správnym pohybom, a to len uchopením jeho koncového člena a jeho presúvaním z bodu do bodu. Tým sa skracuje čas, ktorý musia operátori venovať naučeniu robota správnym pohybom, a znižuje sa potreba technikov na vykonávanie zmien na strojoch, ktoré sú v prevádzke.
Nasadzovanie kartézskych, šesťosových a robotov SCARA je na vzostupe. Ich úlohou je automatizovať procesy, aby sa skrátil čas výrobných či montážnych cyklov, zvyšovať výkon liniek a eliminovať úzke miesta. Pokročilé riadiace systémy robia roboty dostupnejšie a príjemnejšie pre používateľa ako kedykoľvek doteraz, pričom sa zásadne znižujú nároky na ich programovanie. Online nástroje umožňujú používateľom a výrobcom strojov a zariadení v niektorých prípadoch rýchlo vybrať a nakonfigurovať vlastnosti robotov.
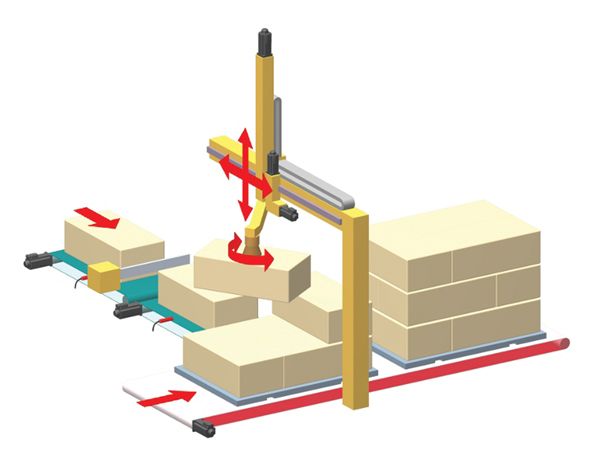
Kartézske roboty, niekedy nazývané aj portálové roboty, sú mechatronické zariadenia, ktoré využívajú motory a lineárne akčné členy na polohovanie nástrojov. Tieto roboty dokážu vykonávať pohyb v troch osiach – X, Y a Z. Fyzické riešenie tvorí rám, ktorý „nesie“ osi a záťaž. Niektoré aplikácie, napríklad vysoko presné obrábanie častí, vyžaduje úplnú podporu základnej osi, obvykle ide o os X. Na druhej strane aplikácie, ako napr. preberanie fliaš z dopravníka, nevyžadujú až takú presnosť, takže celá konštrukcia potrebuje podporovať základnú os len v súlade s odporúčaniami výrobcu akčného člena. Pohyby kartézskych robotov sa odohrávajú len v rámci rámu, pričom ten môže byť namontovaný horizontálne alebo vertikálne, alebo v niektorých konfiguráciách portálu aj vo forme nadzemnej konštrukcie.
Roboty SCARA a šesťosové roboty sú naopak zvyčajne namontované na nejakom podstavci. SCARA sa pohybujú podobne ako kartézske roboty v troch osiach – X, Y a Z, avšak využívajú aj štvrtú os na konci osi Z na otáčanie koncového nástroja. Vďaka tomu sa roboty SCARA veľmi dobre hodia na úlohy vertikálnej montáže, ako je napr. vkladanie kolíkov do dier bez ďalšieho upínania. Avšak rameno robota SCARA je v podstate pákou, čo obmedzuje jeho dosah: kĺby sú dosť namáhané, preto vyžadujú odolné ložiská a motor s vysokým krútiacim momentom, aby pri maximálnom vysunutí ramena dokázal manipulovať so záťažou.
Šesťosové roboty sa hýbu vpred a vzad, hore a dole, môžu zabáčať a pohybovať sa po teoreticky ľubovoľne naprogramovanej trajektórii, čo umožňuje lepšie riešenie pohybu ako pri robotoch SCARA. Takéto vlastnosti sú výhodné pri realizácii zložitejších pohybov, ktoré sa podobajú už na pohyb ľudskej ruky. Dokážu produkt napríklad uchopiť a položiť ho na dopravník. Pohyby navyše, ktoré dokáže šesťosový robot vykonávať, mu v porovnaní s robotmi SCARA umožňujú manipulovať s väčšou záťažou. Šesťosové roboty sa používajú aj v takých aplikáciách, ako je zváranie, paletizácia či obsluha strojných zariadení. Programovanie ich pohybu v trojdimenzionálnom priestore je zložité, takže softvér zvyčajne mapuje pohyb do množiny súradníc, kde je nulový bod umiestnený na prvej kĺbovej osi podstavca.
Ako správne zvoliť typ robota
Výber robota v prvom rade závisí od potrieb konkrétnej aplikácie. Začína sa to definovaním záťaže, s ktorou bude robot pracovať, natáčania, rýchlosti, trasy, presnosti, prostredia a pracovného cyklu.
Záťaž
Dovolená záťaž robota (definovaná jeho výrobcom) musí byť vyššia ako celková záťaž vrátane záťaže nástroja pripevneného na konci ramena robota. Roboty SCARA a šesťosové roboty z tohto pohľadu obmedzuje to, že prenášajú záťaž na vysunutom ramene. Predstavte si obrábacie centrum, ktoré vyrába ložiskové zostavy s hmotnosťou sto a viac kilogramov. Takáto záťaž prekračuje možnosti všetkých robotov SCARA či väčšiny šesťosových robotov. Naopak kartézske roboty dokážu zodvihnúť a umiestniť takúto záťaž ľahko, nakoľko rám aj ložiská podopierajú celý rozsah pohybu.
Aj keď sa plánovaná hmotnosť záťaže robota nachádza v jeho prípustnom rozsahu, môže spôsobiť zníženie presnosti. Napríklad zdvíhanie a ukladanie záťaže s hmotnosťou 50 kg je v rozsahu, ktorý sú schopné zvládnuť roboty SCARA aj kartézske roboty. No 50 kg produkty a práca s nimi je z hľadiska robotov SCARA na ich hornej hranici možností a takéto riešenie by vyžadovalo nákladnejšie riadenie a prvky na zvládnutie takého krútiaceho momentu. Navyše bežné roboty SCARA dokážu umiestniť ťažkú záťaž s presnosťou do 0,1 mm, pretože taká hmotnosť vychyľuje rameno a zhoršuje jeho schopnosť umiestniť záťaž s vyššou presnosťou. Kartézske roboty s guľôčkovými skrutkovými pohonmi a dobre uloženými nosnými ložiskami dokážu opakovane umiestniť 50 kg a ťažšiu záťaž s presnosťou 10 μm.
Natočenie
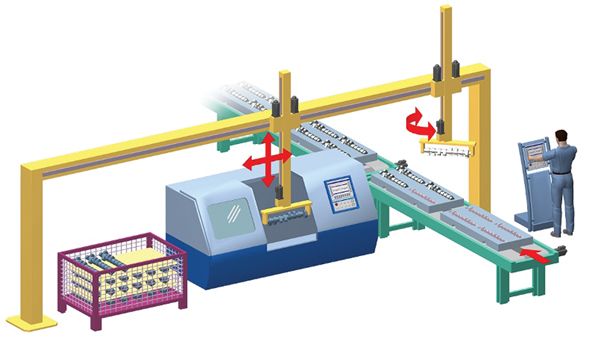
Natočenie (orientácia) závisí od toho, ako je robot namontovaný a ako sú orientované produkty alebo nejaké časti, s ktorými má manipulovať. Cieľom je dostať pôdorys robota s jeho maximálnym dosahom do pracovnej oblasti. Vzhľadom na to, že podstavce pre roboty SCARA alebo šesťosové roboty montované na zemi alebo priamo v rámci linky predstavujú prekážku, nemusia byť vždy vhodným riešením. Ak aplikácia vyžaduje pohyb len v niektorých osiach, potom možno využiť kartézske roboty s malým rámom, pričom ich možno namontovať nad manipulačný priestor tak, aby neprekážali.
Avšak pri zložitejšej manipulácii s produktmi alebo pri manipulácii vyžadujúcej štyri a viac pohybových osí môže kartézsky robot predstavovať príliš veľa prekážok. V takýchto prípadoch je vhodnejší aj malý robot SCARA, ktorý niekedy vyžaduje len 200 mm2 priestoru a štyri skrutky na upevnenie podstavca.
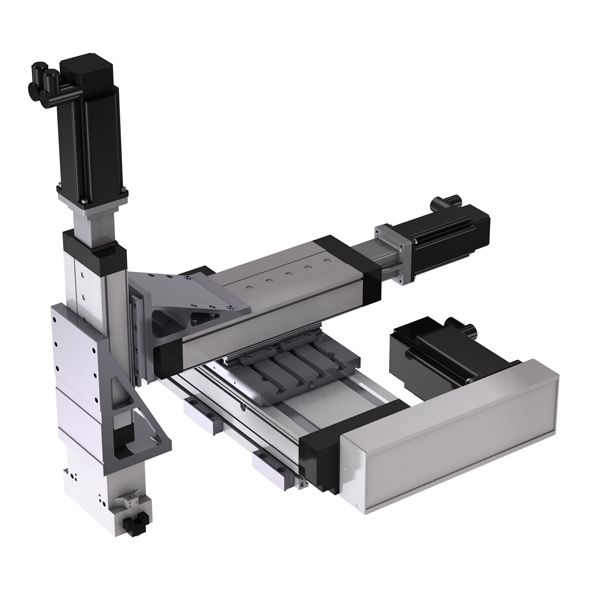
Ďalším faktorom je orientácia produktov alebo častí, s ktorými roboty manipulujú. Roboty SCARA a šesťosové roboty dokážu natáčať časti pod rôznym uhlom a do rôznych polôh. Aby sme dosiahli podobnú flexibilitu pri kartézskych robotoch, sú potrebné určité subkomponenty nazývané posuvné nástroje, ktoré dokážu posúvať ľahké záťaže v osi Z. Tieto moduly zvyčajne používajú na pohyb častí alebo nástrojov v osi Z guľôčkovú ťahovú tyč, čo umožňuje ich nasadenie v aplikáciách manipulácie, ukladania alebo plnenia. Súčasťou kartézskych robotov môžu byť aj rotačné akčné členy, ktoré zabezpečujú ďalšie možnosti natáčania.
Rýchlosť a dráha
Výrobcovia robotov uvádzajú vo svojich katalógových listoch okrem užitočnej záťaže aj údaje týkajúce sa rýchlosti. Jedným z dôležitých parametrov, ktoré treba pri výbere vhodného robota pre aplikácie typu zober a polož zvážiť, je zrýchlenie na väčšie vzdialenosti. Kartéske roboty dokážu zrýchliť na úrovni 5 m/s a viac, čo prevyšuje výkon robotov SCARA aj šesťosových robotov. Kartézske roboty sú tiež vhodné pre aplikácie, kde sa vyžadujú dlhé dráhy, a to preto, že návrhári dokážu veľmi rýchlo upraviť kartézske roboty podľa potreby s rozširujúcimi modulmi tak, aby mohli pracovať na dĺžke až 20 m. Rýchlosť a vzdialenosť sa dajú teda tiež prispôsobiť požiadavkám zákazníka, a to pomocou remeňov, lineárnych motorov alebo skrutkovými pohonmi. Kĺbové roboty sú na rozdiel od toho prednastavené na konkrétny dosah, napr. 500 mm.
Roboty SCARA a šesťosové roboty majú prednastavený rozsah presnosti, čo uľahčuje stanovenie ich opakovateľnej presnosti pohybu. Avšak pri ich nákupe „zväzujú“ tieto roboty vývojárov jednou úrovňou presnosti. Koncoví používatelia dokážu zmodernizovať kartézske alebo portálové roboty na množstvo rôznych úrovní presností, napr. zmenou akčného člena na skrutkové pohony až na úroveň 10 μm. S cieľom dosiahnuť menšiu presnosť a zníženie nákladov môže koncový používateľ prejsť na pneumatický alebo remeňový pohon a iné akčné členy pre presnosť 0,1 mm.
Presnosť je kľúčovou požiadavkou pri špičkových aplikáciách, akými sú obrábacie procesy. Kartézske roboty preto potrebujú lepšie mechanické komponenty, ako napr. veľmi presne opracované stoly s guľovými koľajnicami a pohony s guľovými skrutkami. Pri aplikáciách, kde nedokážu roboty SCARA a šesťosové roboty udržať presnosť pre vychýlenie ramena, možno zvážiť použitie kartézskych robotov s vysoko presnými lineárnymi ložiskami. Rozstup medzi ložiskami minimalizuje vychýlenie, takže koncový efektor možno polohovať presnejšie. Aj keď malý zastavaný priestor favorizuje roboty SCARA alebo šesťosové roboty, niekedy sú zložitejšie a cenovo nákladnejšie.
Okolité prostredie
Dva ukazovatele, ktoré určujú najvhodnejší typ robota pre konkrétnu aplikáciu, sú okolité prostredie pracovného priestoru robota a riziká, ktoré môžu v tomto prostredí vzniknúť. Tretí faktor, či bude robot pracovať v priestore, kde treba udržiavať čistotu, nie je vo všeobecnosti až taký problém, nakoľko všetky typy robotov sú vyrábané vo verziách pre čisté prostredie.
Podstavce, na ktorých sú umiestnené roboty SCARA alebo šesťosové roboty, sú zvyčajne kompaktné, čo je pre obmedzený priestor veľmi výhodné. Avšak ak to aplikácia dovoľuje, rovnako užitočná je v prípade kartézskeho robota aj montáž jeho nosného rámu nad priestorom aplikácie alebo na stenu. Pre aplikácie s mechanickým kontaktom, napr. keď sa robot musí dostať do nejakej škatule a vytiahnuť z nej produkty, sa najvhodnejším riešením javí šesťosový robot. Jeho cena je však s porovnaní s kartézskym robotom vyššia, avšak takéto náklady sú oprávnené, ak neexistujú iné možnosti, ako zrealizovať aplikáciu bez zložitých pohybových sekvencií.
Faktory okolitého prostredia, ako sú napr. nečistoty a prach, tiež ovplyvňujú výber robota. Kĺby robotov SCARA a šesťosových robotov môžu byť pokryté vlnovcami a akčné členy osi Z sú chránené rôznymi tesneniami. Pre priestory využívajúce čistenie vzduchom môžu technici navrhnúť ochranu lineárnych akčných členov na úrovni IP 65, ktorá minimalizuje prienik vody a prachu. Vysoko výkonné tesnenia zase chránia množstvo prídavných prvkov, ktoré sa nachádzajú v konštrukcii jednotlivých osí.
Pracovný cyklus
Vykonanie jedného pracovného cyklu zaberá určitý čas. Roboty, ktoré pracujú nepretržite 24/7, sa opotrebujú a dosiahnu koniec svojej životnosti skôr ako roboty, ktoré pracujú 8 hodín denne, päť dní v týždni. Vyjasnite si tieto fakty vopred a vyberte si roboty s dlhšími intervalmi mazania a nízkymi požiadavkami na údržbu, aby ste predchádzali neskoršiemu opotrebovaniu.
Vlastnosti robotov SCARA a šesťosových robotov
Technologický vývoj znamenal pokrok vo všetkých typoch robotov, avšak roboty SCARA a šesťosové roboty:
- majú výbavu na splnenie požiadaviek na definovanú rýchlosť a pohyby a prinášajú vyšší výkon, ktorý možno ihneď využiť,
- môžu byť drahšie, pretože sa dodávajú s drahšími doplnkami, ako sú napr. proprietárne riadiace systémy,
- vykonávajú komplikované úlohy a vyžadujú viac programovania pri zložitých pohyboch,
- zaberajú menej miesta a menej vážia, čo je výhodné z hľadiska celkovej zastavanej plochy a splnenia nárokov na požadovanú rýchlosť,
- majú menší dosah ramena, pretože sú konštruované tak, aby boli ľahké a zároveň dokázali manipulovať s ťažšou záťažou,
- dodávajú sa s prednastavenými výkonovými parametrami.
Vlastnosti kartézskych robotov
Za posledných osem rokov klesli celkové náklady na vlastníctvo kartézskych robotov o viac ako 25 %, a to vďaka prednastaveným balíkom riadenia, online návrhovým nástrojom a úspornejším rozsahom. Dnes ponúka tento typ robotov množstvo malých a stredných výrobcov, pričom oblasti ich nasadenia sú typu nakladanie a vykladanie, uchop a polož, balenie či pomocné činnosti obrábacích strojov. Kartézske roboty navyše:
- pozostávajú zo štandardných komponentov, ktoré možno pri zostavovaní robota kombinovať a stoja menej ako roboty na konkrétne účely,
- možno vyšpecifikovať v rámci dostupných online nástrojov,
- sú bezpečnejšie.
Zdroj: Vaughn, R.: The Difference between Cartesian, Six-Axis, and SCARA Robots. Bosch Rexroth, edited by Elisabeth Eitel. [online]. Publikované 2. 12. 2013. Citované 10. 1. 2018.
-tog-
