


Frekvenčné riadenie asynchrónneho motora
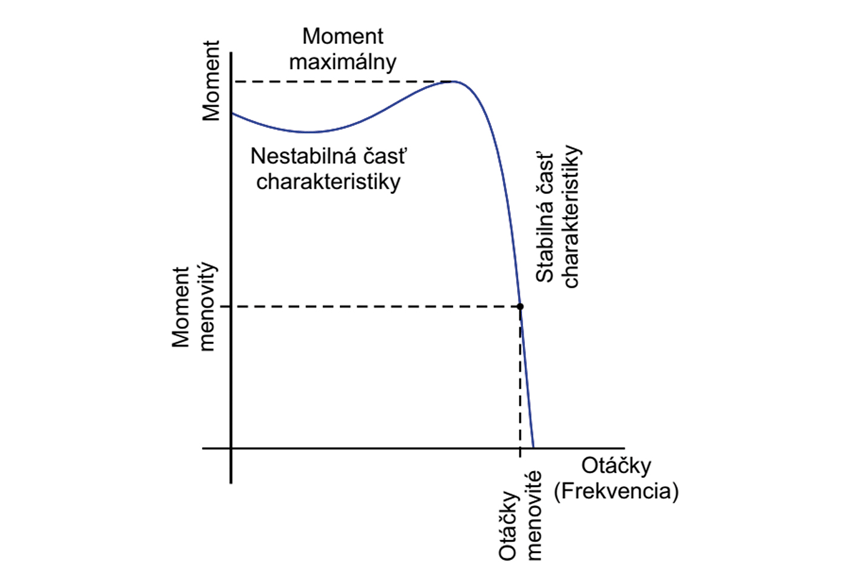
Pri vysvetlení princípu frekvenčného riadenia si pomôžeme obrázkami, ktoré už boli v našom seriáli publikované, ale dnes sa na ne pozrieme z iného pohľadu. Prvým z nich je momentová charakteristika asynchrónneho motora s kotvou nakrátko (AMK), ktorá udáva závislosť momentu motora od frekvencie napájacieho napätia (obr. 54). Keďže otáčky motora závisia od frekvencie, zvyknú sa na vodorovnú os vynášať alternatívne aj otáčky. Priesečník charakteristiky s osou otáčok predstavuje potom synchrónnu frekvenciu, resp. fiktívne synchrónne otáčky, ktorými by sa motor točil, keby nebol zaťažený. Vzhľadom na princíp činnosti AMK tieto otáčky sám motor nedosiahne, jeho otáčky budú vždy nižšie ako synchrónne. Charakteristiku AMK pri napájaní menovitým napätím a frekvenciou budeme označovať ako prirodzenú. Ak je motor napájaný zo siete, jeho pracovný bod, t. j. kombinácia momentu a otáčok, sa môže nachádzať len na prirodzenej charakteristike.
Charakteristika na obr. 54 má niekoľko významných oblastí a bodov:
- Stabilná časť charakteristiky – je oblasť od synchrónnych otáčok po bod zvratu (maximálny moment). Táto časť je pracovná oblasť motora. V pásme od nulového do menovitého momentu môže motor pracovať trvale, v pásme medzi menovitým a maximálnym momentom krátkodobo.
- Nestabilná časť charakteristiky – je oblasť od štartu motora po maximálny moment. Prevádzka v tejto oblasti sa vyznačuje veľkým prúdom (až 7 x IN) a momentom (až do cca 2,5 x MN). Pri prevádzke bez frekvenčného meniča je snaha cez túto oblasť prejsť čo najrýchlejšie, aby sa pohon (motor, vodiče a infraštruktúra) zbytočne tepelne nezaťažoval. Ak je AMK napájaný z frekvenčného meniča, tak v tejto oblasti nepracuje.
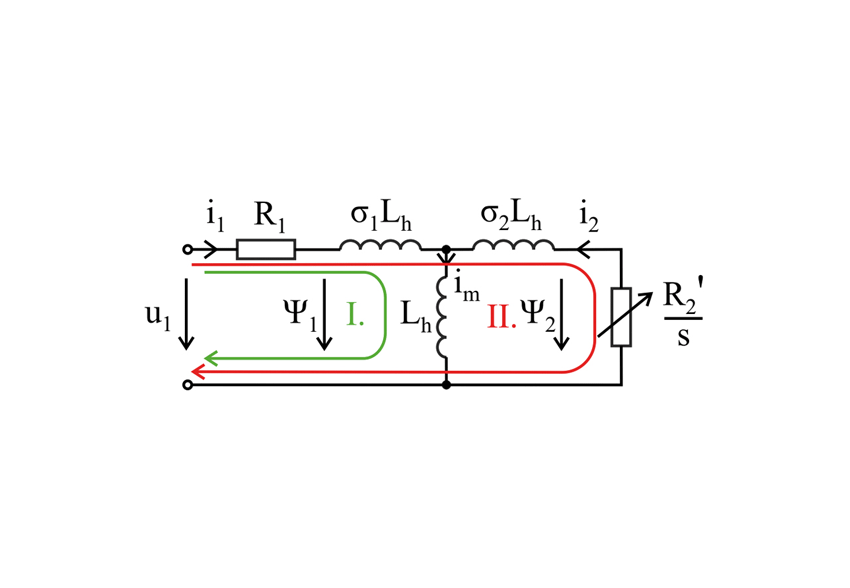
Druhým obrázkom je náhradná schéma AMK, ktorá je podobná ako pri transformátore. Aj tu platí, že veličiny a parametre zo sekundárnej strany (tu rotor, index 2) sa prepočítavajú na primárnu stranu (tu stator, index 1). V nasledujúcom texte si ukážeme, čo jednotlivé prvky náhradnej schémy v motore ovplyvňujú. Dá sa to vysvetliť pomocou menovitej impedancie AMK označenej ZN. Pre bežné AMK s výkonom v rozsahu 5 ÷ 500 kW približne platí [1]:
![]() (29)
(29)
kde UsN je menovité (združené) napätie a IN menovitý fázový prúd motora. Obidva údaje sú uvedené na štítku stroja. Pre parametre náhradnej schémy potom platí:
- Odpor statorového vinutia, resp. prepočítaný odpor rotorového vinutia R1 ≅ R2´ = 0,4 ÷ 4 % ZN a číselne sú približne rovné sklzu (menšia hodnota platí pre väčšie motory). Na odporoch vznikajú činné straty, ktoré generujú teplo v stroji.
- Rozptylová impedancia statora i rotora sú približne rovnaké. Sú dané vzťahom:
 (30)
(30)
kde σ1 a σ2 sú koeficienty rozptylu statora a rotora, Lh je hlavná (magnetizačná) indukčnosť a f je frekvencia napájacieho napätia. V porovnaní s transformátorom má AMK pre väčšiu vzduchovú medzeru rozptylovú impedanciu väčšiu. Pri priamom pripojení motora na sieť rozptylové indukčnosti spolu s odpormi znižujú veľkosť a rýchlosť nárastu záberového prúdu, preto majú zámerne vyššiu hodnotu. V prípade napájania motora z frekvenčného meniča však spomaľujú nárast momentu stroja. Preto majú AMK určené výlučne na prevádzku z frekvenčných meničov odpor rotora aj rozptylové indukčnosti znížené (vetva II. na obr. 55). - Hlavná impedancia. Hlavná indukčnosť Lh sa podieľa na tvorbe magnetického toku v stroji. Hlavná impedancia je daná vzťahom:
 (31)
(31)
Zo vzťahu (31) vyplýva, že magnetizačný prúd im, ktorý je približne rovný prúdu motora naprázdno, bude dosahovať cca 50 % IN pri malých a cca 15 % IN pri veľkých motoroch (vetva I. na obr. 55). - Čas odmagnetovania motora. Po odpojení AMK od napájania rotorový tok v stroji pomaly zaniká. Rýchlosť jeho poklesu závisí od rotorovej časovej konštanty a pohybuje sa od cca 500 ms pri motoroch s výkonom do 10 kW po cca 5 s pri motoroch s výkonom 500 kW. Pri rotujúcom stroji je tak rotor schopný v uvedenom čase generovať na svorkách motora indukované napätie s klesajúcou amplitúdou a rastúcou periódou. Tento fakt treba brať do úvahy napr. pri brzdení motora jednosmerným prúdom alebo pri pripájaní meniča na rotujúci motor.
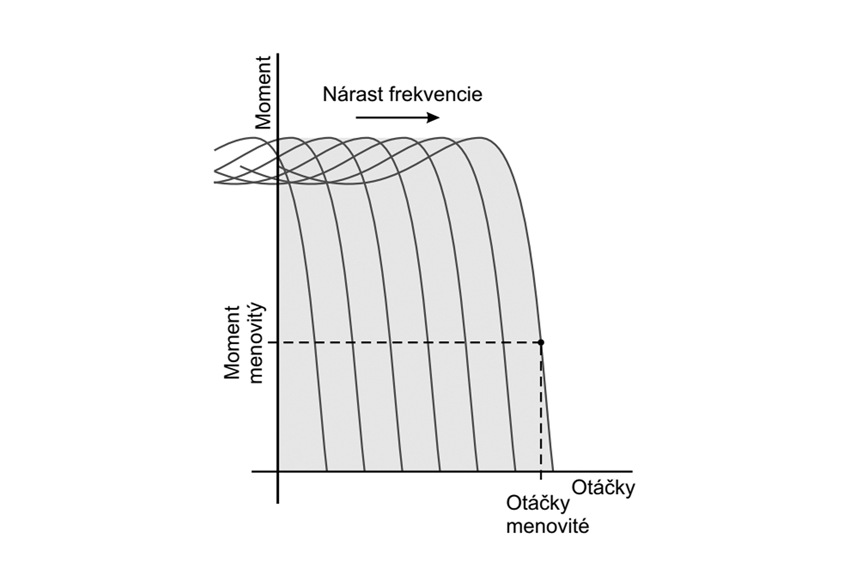
Pokiaľ sa spolu so zmenou veľkosti napájacieho napätia v rovnakom pomere mení aj jeho frekvencia, magnetizačný prúd stroja a tým aj jeho tok zostanú konštantné. Prirodzená momentová charakteristika sa pri zmene frekvencie bude posúvať po osi otáčok (obr. 56). Pohon pracuje trvale na stabilnej časti charakteristiky, a to od nulových po menovité otáčky. Vyhneme sa tak prechodu cez nestabilnú oblasť charakteristiky a veľkému záberovému prúdu typickému pre priame pripojenie AMK na sieť. Vďaka možnosti posúvať charakteristiku možno na pohone nastaviť ľubovoľný pracovný bod (sivá zóna). Tento spôsob riadenia sa nazýva frekvenčné riadenie. Súčasnú zmenu napájacieho napätia a frekvencie umožňuje práve frekvenčný menič. Pri prevádzke v tomto režime dochádza len k minimálnym stratám energie.
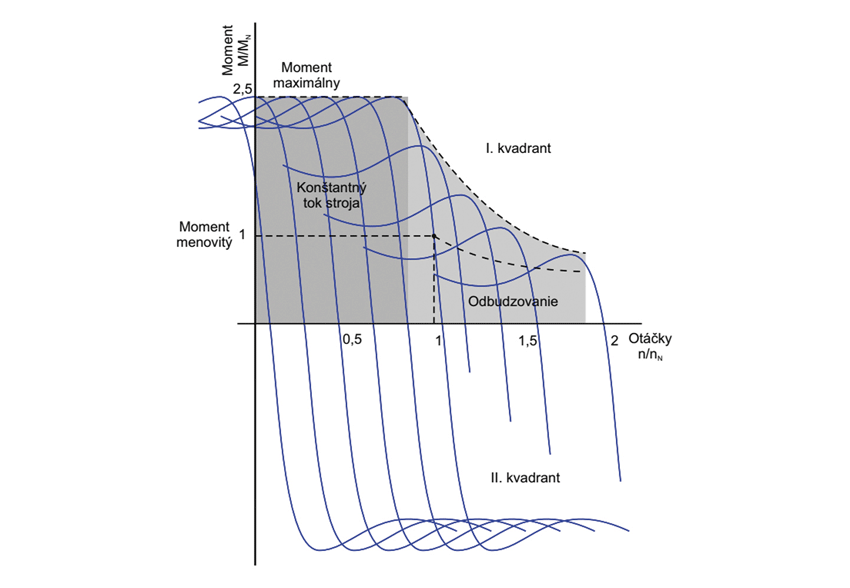
Ak sa frekvencia napájania zvyšuje z nulovej po menovitú hodnotu, napájacie napätie takisto rastie po menovitú hodnotu. Pri ďalšom zvyšovaní frekvencie už nie je možné napätie zvyšovať, čo spôsobí, že pomer U1/f1 sa bude znižovať a motor postupne odbudzovať. Dosiahneme tak vyššie otáčky ako menovité, ale moment stroja, ktorý bude k dispozícii, bude v tomto pásme menší (obr. 57).
Sivé pásmo na obr. 57 predstavuje motorickú prevádzku AMK (I. kvadrant). AMK dokáže bez zmeny zapojenia pracovať aj ako generátor, resp. brzda. Podmienkou je, aby zostal pripojený k zdroju (sieť alebo frekvenčný menič) kvôli budeniu stroja. Ak pri danej frekvencii a napätí motoru mechanicky zvýšime otáčky, prejde pracovný bod po nastavenej charakteristike z I. do II. kvadrantu a začne do zdroja dodávať energiu. Veľkosť brzdného momentu bude závisieť od aktuálnych otáčok stroja a nastavenej charakteristiky, t. j. nastavenej frekvencie zdroja.
Regulačné štruktúry frekvenčných meničov
Regulačné štruktúry používané v komerčných frekvenčných meničoch závisia od požiadaviek na kvalitu riadenia. Používajú sa tieto základné štruktúry:
- skalárne riadenie (riadenie V/f),
- vektorové riadenie,
- priame riadenie momentu.
Najčastejšie využívanými štruktúrami sú skalárne a vektorové riadenie, pričom napätie s premenlivou veľkosťou a frekvenciou sa vytvára v striedači pomocou šírkovo impulzovej modulácie (PWM). Výkonová časť meniča býva pre oba spôsoby riadenia rovnaká, líši sa len spôsob riadenia. Konkrétna realizácia a názov spôsobu riadenia sa môže u jednotlivých výrobcov líšiť. Softvér meničov je zvyčajne riešený tak, že používateľ si môže vybrať medzi niekoľkými variantmi skalárneho a vektorového riadenia. Priamemu riadeniu momentu sa budeme venovať nabudúce.
Skalárne riadenie
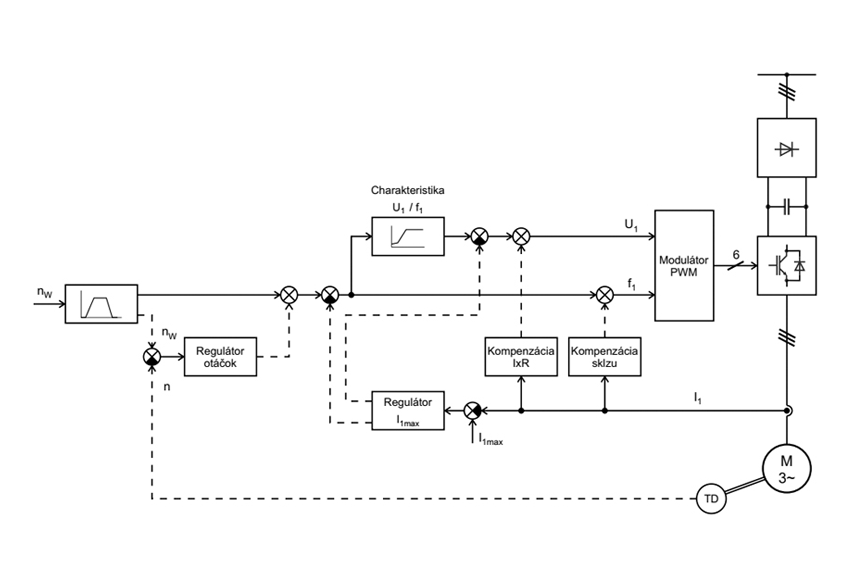
Pri pohonoch s nižšími nárokmi na kvalitu a dynamiku regulácie sa používa skalárne riadenie, v praxi označované ako V/f riadenie. Príklad štruktúry regulácie používanej v komerčných meničoch je na obr. 58. Menič nastavuje podľa želaných otáčok príslušnú frekvenciu f1, ku ktorej priradí výstupné napätie U1 tak, aby bol zachovaný želaný pomer U1/f1. Tým sa nastaví príslušná momentová charakteristika (obr. 57). Moment motora sa v tomto prípade neriadi, otáčky pohonu sa na charakteristike prispôsobia momentu, ktorým je pohon zaťažený.
Výhodou skalárneho riadenia je, že je jednoduché. Nie je citlivé na zmenu parametrov motora, hlavne zmenu odporu spôsobenú zmenou teploty, ani na prípadnú výmenu motora pripojeného k meniču. Primárne sa používa na napájanie AMK, kde sa nevyžaduje vysoká presnosť a dynamika, ako sú pohony dopravníkov, čerpadiel, ventilátorov a pod. Využíva sa aj pri viacmotorových pohonoch, keď je na jeden menič pripojených viac motorov. Riadenie sa používa pri pohonoch s výkonom do cca 150 kW. Problémom pri vyšších výkonoch je náchylnosť ku kmitaniu momentu pri nízkych frekvenciách a v pásme odbudenia, čo vyžaduje presné nastavenie pohonu.
Regulačná štruktúra skalárneho riadenia
Zmena frekvencie aj veľkosti výstupného napätia sa v súčasných frekvenčných meničoch robí v striedači, ktorý je osadený tranzistormi IGBT. Základom riadenia je kanál žiadanej frekvencie f1, ktorej sa priradí hodnota napätia U1 (na obr. 58 sú vyznačené plnou čiarou). K tomuto základu sa pridávajú korekcie, ktoré zlepšujú kvalitu a presnosť riadenia (na obr. 58 sú vyznačené čiarkovane).
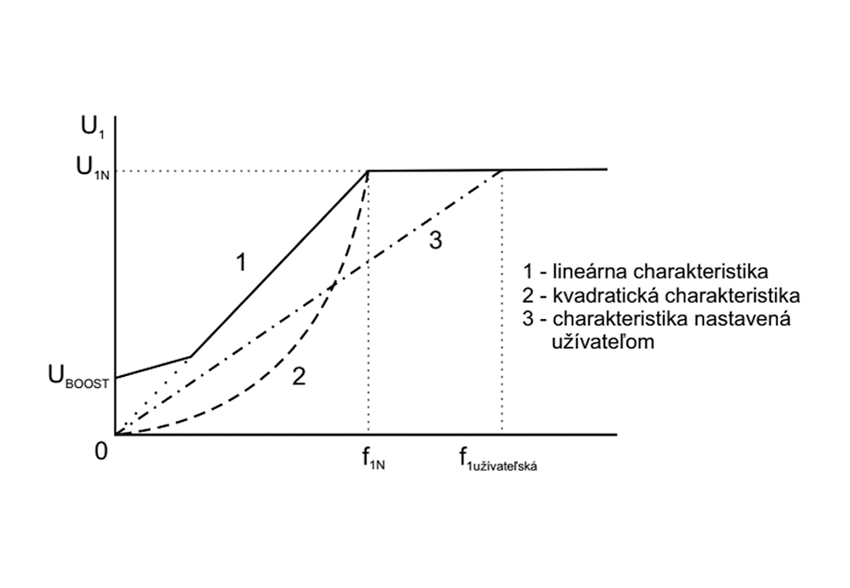
Charakteristiku U1/f1 možno nastaviť. Používajú sa tri základné nastavenia (obr. 59):
- Lineárna charakteristika – do menovitej frekvencie je prostredníctvom konštantného pomeru U1/f1 udržiavaný konštantný magnetický tok v stroji. To umožňuje využívať v tejto oblasti menovitý moment motora. Pomer U1/f1 sa zvyčajne nastavuje tak, že U1N motora (400 V) sa dosiahne pri f1N (50 Hz). Ak sa pomer nastaví tak, že hodnota U1N sa dosiahne pri vyššej frekvencii ako f1N, motor bude pracovať aj v oblasti do f1N so zníženým budením, čo sa prejaví na zmäkčení jeho momentovej charakteristiky.
- Kvadratická charakteristika sa používa pri pohonoch s tzv. ventilátorovou charakteristikou záťažového momentu (ventilátory, čerpadlá). Tento typ záťaže pri malej rýchlosti nevyžaduje veľký moment, preto stroj môže v tejto oblasti pracovať odbudený s nižším magnetizačným prúdom, čo šetrí elektrickú energiu. S rastúcou frekvenciou potom pomer U1/f1 rastie rýchlejšie ako pri lineárnej charakteristike a pri menovitej frekvencii dosiahne menovité napätie U1N.
- Používateľská charakteristika – používateľ má možnosť nastaviť pomer U1/f1 podľa svojich potrieb. Jednou z možností je dosiahnutie U1N pri frekvencii 87 Hz. Používa sa pri motoroch v konfigurácii 230 V/400 V (Δ/Y). Takýto motor sa bežne pripája na sieť (i menič) v zapojení do hviezdy na 3 x 400 V/50 Hz a pri napájaní z meniča preň platí lineárna charakteristika U1/f1. Keďže frekvenčný menič dokáže generovať napätie aj s vyššou frekvenciou, môžeme tento motor k meniču pripojiť v zapojení do trojuholníka na 3 x 400 V/87 Hz. Dosiahneme tak zväčšenie oblasti s konštantným magnetickým tokom až po frekvenciu 87 Hz. V tomto pásme potom môže motor pracovať s menovitým momentom.
Uvedenú možnosť dokumentujeme nasledujúcim výpočtom. Úpravou vzťahu (29) dostaneme vzťah pre menovitý prúd motora:
![]() (32)
(32)
Ak uvážime, že statorový odpor a rozptylová impedancia sú v porovnaní s magnetizačnou impedanciou malé (obr. 55) a zanedbáme ich, magnetizačný prúd motora zapojeného do trojuholníka a pripojeného na sieť 3 x 230 V/50 Hz bude:
 (33)
(33)
Ak zvýšime napätie aj frekvenciu v rovnakom pomere (√3-krát), magnetizačný prúd aj tok v stroji zostane aj pri vyššom napätí zachovaný:
 (34)
(34)
V tomto prípade sa odporúča zaradiť na výstup meniča tlmivku.
Napätie na charakteristike U1/f1 sa pri nízkych frekvenciách zvyšuje, aby sa kompenzoval úbytok na statorovom odpore a dosiahol sa tak dostatočný magnetizačný a rozbehový prúd. Toto zvýšenie napätia sa nazýva boost a dosahuje cca 30 % U1N.
Schéma na obr. 58 obsahuje niekoľko ďalších blokov, ktoré zlepšujú kvalitu riadenia.
- Kompenzácia I x R. Aby sa pri otáčkach nad cca 10 % udržal konštantný tok v stroji nezávislý od veľkosti záťaže, pridáva sa do napäťovej vetvy kompenzácia úbytku na vedení k motoru a statorovom odpore, ktorá je odvodená od veľkosti odoberaného prúdu. Používa sa pri malých motoroch.
- Regulátor Imax obmedzuje prúd, ak ten počas prevádzky dosiahne maximálnu hodnotu. Dochádza k tomu v dvoch prípadoch:
– V oblasti nízkych otáčok, ak nebol správne nastavený boost na charakteristike U1/f1. V tomto prípade sa redukuje napätie motora.
– V oblasti vysokých otáčok sa môže stať, že rozbehová rampa otáčok je pre danú mechanickú záťaž príliš strmá a skutočné otáčky je nedokážu sledovať. Narastá tak rozdiel medzi žiadanými a skutočnými otáčkami a pracovný bod pohonu sa posúva po charakteristike k bodu zvratu. Ak by ho prekonal, pohon by prešiel do nestabilnej časti charakteristiky a zastavil by sa. Regulátor Imax spomalí nárast žiadanej frekvencie (žiadaných otáčok) tak, aby motor zostal pracovať na stabilnej časti charakteristiky. Regulátor tak plní funkciu obmedzovača sklzu. - Kompenzácia sklzu. Skalárne riadenie sa používa väčšinou bez snímača otáčok, v tzv. otvorenej slučke (na obr. 58 základná štruktúra vyznačená plnou čiarou). Frekvenčný menič nastaví frekvenciu a napätie motora a tým príslušnú charakteristiku (obr. 56). Otáčky AMK sa prispôsobia veľkosti záťažového momentu. Keďže momentová charakteristika je tvrdá, zmena otáčok ani pri veľkej zmene momentu nebude výrazná. Tento spôsob regulácie sa preto využíva tam, kde malý rozdiel medzi želanými a skutočnými otáčkami neprekáža.
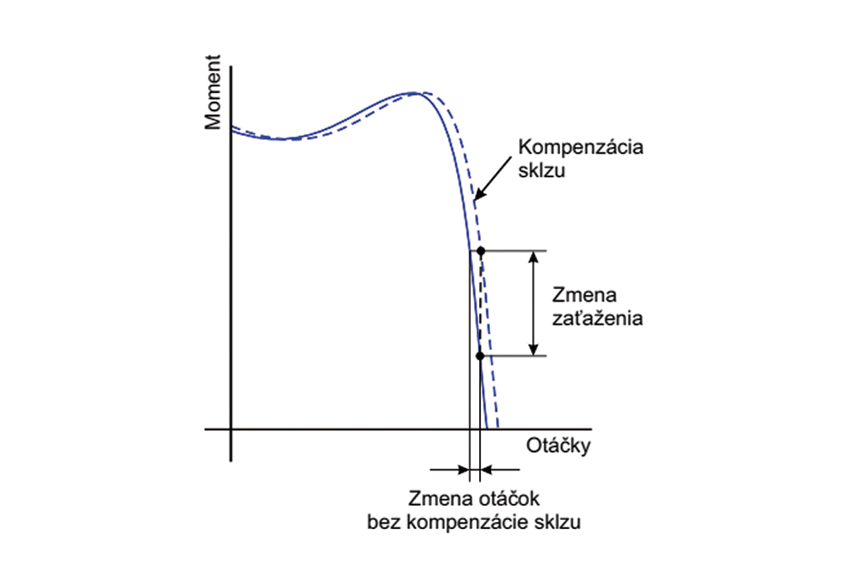
Regulačnú odchýlku otáčok v otvorenej slučke možno zmenšiť, ak sa k základnej štruktúre na obr. 58 pridá kompenzácia sklzu. Menič dokáže na základe veľkosti prúdu odoberaného motorom stanoviť približnú hodnotu sklzu. Na jej základe sa zvýši žiadaná frekvencia a momentová charakteristika sa posunie tak, aby pohon aj pri vyššom záťažovom momente pracoval na pôvodných otáčkach (obr. 60). Veľkosť regulačnej odchýlky potom závisí od presnosti uvedenej kompenzácie. Tento spôsob riadenia sa nedá použiť pri skupinovom pohone, pretože rozdelenie prúdov na jednotlivé motory, a teda ani sklz nemusí byť na všetkých motoroch rovnaké.
- Regulačná štruktúra niektorých komerčných meničov obsahuje voľný PID regulátor, ktorý môže používateľ zaradiť do regulačnej schémy. Ak je menič vybavený rozhraním na pripojenie snímača otáčok, možno voľný PID regulátor použiť ako regulátor otáčok. Dostaneme tak riadenie otáčok v uzavretej slučke (na obr. 58 základná štruktúra + regulátor otáčok). Dosiahneme tak ešte vyššiu presnosť riadenia otáčok ako pri kompenzácii sklzu.
Ako už bolo spomenuté, skalárne riadenie neumožňuje presné riadenie momentu motora. Pri dynamicky náročných aplikáciách sa preto používa vektorové riadenie alebo priame riadenie momentu AMK. O týchto metódach budeme hovoriť v nasledujúcom čísle.
Literatúra
[1] Klautchek, H.: Vektorregelung für Asynchronmaschinen. Konferencia Elektrické pohony, Plzeň 1993.
[2] SINAMICS Engineering Manual. June 2020. A5E50260647B AA. Siemens AG 2020.
Peter Girovský
František Ďurovský
Želmíra Ferková
Ján Kaňuch
Marek Pástor
Technická univerzita v Košiciach
Fakulta elektrotechniky a informatiky
Katedra elektrotechniky a mechatroniky
peter.girovsky@tuke.sk






