


Vektorové riadenie asynchrónneho motora
V aplikáciách, ktoré vyžadovali presné riadenie momentu, otáčok, príp. polohy, a to s vysokou dynamikou, dominovali do 90. rokov minulého storočia pohony s jednosmerným cudzobudeným motorom (JSCBM). Základom črtou takýchto aplikácií je presné a rýchle riadenie momentu motora. Moment JSCBM sa vytvára na základe vzájomného pôsobenia statorového toku a prúdu rotora. Statorový tok Φ je vytvorený budiacim prúdom ib a rotorový prúd je prúd kotvy ia. Moment motora je potom daný rovnicou:
![]() (35)
(35)
kde C a kb sú konštrukčné konštanty stroja. Výhodou JSCBM je, že obe zložky sa dajú riadiť nezávisle prostredníctvom oddelených vinutí. Okrem toho platí, že vzájomná poloha magnetického poľa tvoreného budením stroja a vodičov, cez ktoré tečie kotvový prúd, je kolmá, stála a zabezpečená konštrukciou stroja prostredníctvom komutátora. Časová konštanta budiaceho vinutia je rádovo väčšia ako pri vinutí kotvy. Preto sa budiaci tok v stroji udržiava konštantný, príp. sa mení pomaly pri odbudzovaní, a rýchle zmeny momentu sú realizované v kotvovom obvode.
V prípade asynchrónneho motora (AM) je situácia zložitejšia. Tvorba momentu v AM síce funguje na podobnom princípe ako v JSCBM, ale problémom je, že magnetický tok v stroji rotuje a prúd v rotore sa nedá priamo riadiť ani merať, čo platí hlavne pri asynchrónnom motore s kotvou nakrátko (AMK). Ďalším problémom je, že na riadenie prúdu a magnetického toku v stroji je k dispozícii len jeden vstup do motora, a to jeho trojfázové napájanie.
Základom vektorového riadenia je určenie presnej polohy a veľkosti vektora magnetického toku v stroji, voči ktorému sa potom nastavuje vektor statorového prúdu. Ich vzájomným pôsobením sa v stroji generuje moment. Z toho pochádza aj názov metódy vektorové riadenie (angl. field oriented control – FOC).
Prvé verzie vektorového riadenia, ktoré sa objavili na prelome 60. a 70. rokov minulého storočia [1], využívali na určenie veľkosti a polohy magnetického toku vo vzduchovej medzere jeho priame meranie pomocou Hallových sond alebo vložených vinutí. Výhodou riešenia bolo, že sa meral priamo magnetický tok, takže v riadení nebolo nutné zohľadňovať nelinearity magnetického obvodu. Nevýhodou bola nutnosť inštalácie meracích sond do úzkej vzduchovej medzery a ich závislosť od teploty. Prevádzka takto upraveného motora bola nepraktická. Preto sa hľadali spôsoby, ako magnetický tok určiť nepriamo, a to z veličín meraných na svorkách motora, predovšetkým zo statorového prúdu.
Vektorové riadenie môže byť orientované na niektorý z magnetických tokov v stroji: statorový, rotorový alebo rotorový magnetizačný tok. Na vysvetlenie princípu riadenia použijeme posledný z nich, pri ktorom je moment motora definovaný rovnicou:
![]() (36)
(36)
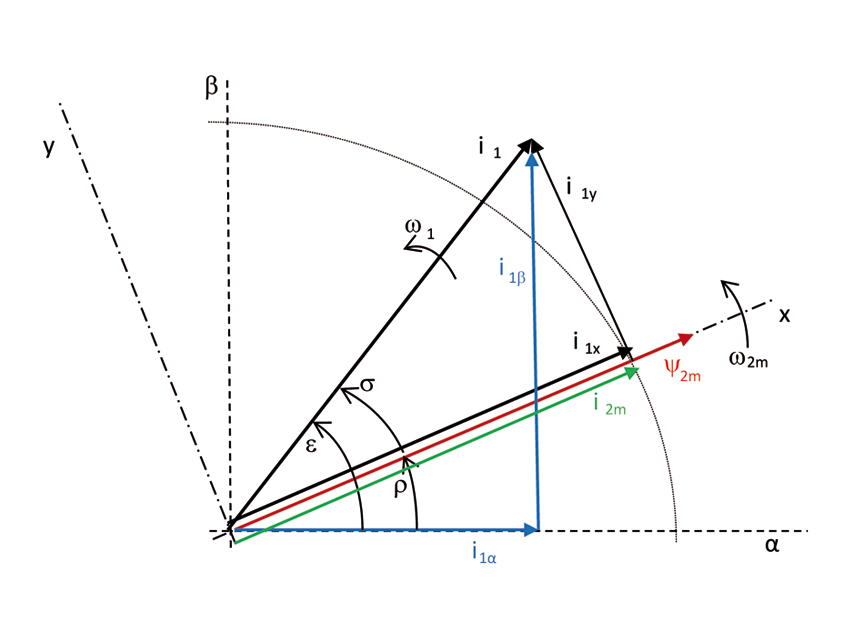
kde c1k je konštanta (za predpokladu linearizovanej magnetizačnej charakteristiky), |ψ2m| je modul (amplitúda) priestorového vektora magnetického toku rotora a i1y je tzv. momentotvorná zložka statorového prúdu v točivej súradnicovej sústave x, y (obr. 61).
Nepriame určenie veľkosti a polohy magnetického toku v stroji vychádza z merania fázových prúdov na motore. Z nich sa určí veľkosť a poloha vektora statorového prúdu i1 najprv v súradnicovej sústave spojenej so statorom, ktorá je tvorená osami α, β (obr. 61). Táto sústava sa nepohybuje, ale vektor prúdu v nej rotuje a jeho zložky i1α a i1β majú sínusový priebeh, čo komplikuje ich riadenie. Preto sa robí ďalšia transformácia do točivej sústavy (jej osi sú označené x, y), ktorá rotuje rovnakou rýchlosťou ako magnetický tok v rotore ψ2m. Voči rotujúcej sústave už vektor prúdu nerotuje a jeho poloha sa mení len podľa toho, ako sa menia jeho zložky i1x a i1y. Riadenie zabezpečuje, že vektor ψ2m leží vždy v osi x súradnicovej sústavy a rotuje spolu s ňou. Veľkosť vektora magnetického toku v stroji ψ2m sa riadi zložkou prúdu i1x, ktorú nazývame tokotvorná a ktorá je ekvivalentom budiaceho prúdu v JSCBM. Tok v stroji sa do menovitých otáčok udržiava konštantný, pri vyšších otáčkach sa znižuje, čím sa motor odbudzuje, podobne ako pri JSCBM. Veľkosť momentu sa nastavuje zložkou i1y, ktorá sa nazýva momentotvorná a je ekvivalentom kotvového prúdu v JSCBM. Táto zložka je kolmá na tok stroja ψ2m a zodpovedá za rýchle a presné riadenie momentu. Pri kladnej hodnote i1y (ako na obr. 61) vektor i1 predbieha tok stroja a moment motora je kladný. Pri zápornej hodnote i1y vektor i1 zaostáva za tokom stroja, moment je záporný a motor brzdí. Moment motora sa tak riadi nepriamo prostredníctvom tokotvornej i1x a momentotvornej zložky statorového prúdu i1y. Rýchlosť ψ2m, ktorou rotuje točivá súradnicová sústava x, y, ako aj zložky prúdu i1x a i1y, sa priebežne počítajú v matematickom modeli motora v riadení meniča.
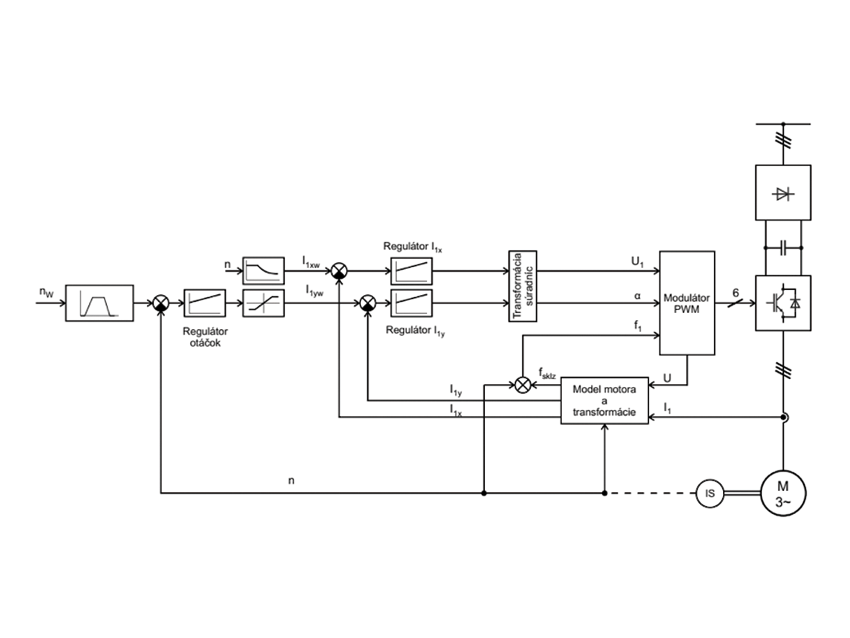
Samotná regulácia, ktorá sa počíta tiež v točivých súradniciach, pozostáva z vetvy riadenia momentu (regulátor otáčok s podradenou reguláciou momentotvornej zložky prúdu) a vetvy budenia (regulácia rotorového toku s podradenou reguláciou tokotvornej zložky prúdu) a je podobná ako pri riadení JSCBM. Výstupy regulátorov sa potom spätne transformujú do statorových súradníc a vedú do modulátora PWM, ktorý generuje riadiace impulzy pre tranzistory striedača (obr. 62).
Ako bolo spomenuté, vektorové riadenie využíva matematický model motora na výpočet veličín, ktoré sa nedajú priamo merať. Parametre motora si riadenie vypočíta zo zadaných štítkových údajov a spresní meraním pri oživovaní pohonu. Okrem výpočtu zložiek prúdu a uhlovej rýchlosti magnetického toku v rotore možno z modelu získať aj informáciu o veľkosti indukovaného napätia Ui, ktorá sa využíva ako náhradný údaj o otáčkach motora. Statorové napätie potrebné na výpočet modelu môže byť určované aj z napätia medziobvodu a stavu spínačov striedača. Možnosť získať informáciu o otáčkach motora z jeho modelu je lákavá, pretože umožní reguláciu otáčok bez použitia snímača otáčok (angl. sensorless control). Výhodou je úspora nákladov na snímač a kabeláž, úspora priestoru pri motore a spoľahlivejšia prevádzka. Takýto pohon je dostatočne presný v oblasti nad 5 ÷ 10 % nN motora. Pri otáčkach blízkych nule už údaj o otáčkach nie je presný, pretože hodnota Ui je malá a nepresná. Pre oblasť otáčok blízkych nulovým sa riadenie prepína na iný typ, napr. skalárne. Tam, kde sa vyžaduje presné riadenie otáčok a momentu v celom pracovnom rozsahu, sa používa snímač otáčok.
Ďalšou hodnotou, ktorá výrazne ovplyvňuje presnosť modelu, je zmena rotorového odporu v závislosti od teploty. Pri prevádzke sa R2 mení od cca 65 % pri studenom motore po 100 % a viac pri teplom motore. Zmena odporu ovplyvňuje presnosť určenia rýchlosti ω2m, od ktorej závisí presnosť transformácie do točivých súradníc a tým presnosť celej vektorovej regulácie. Preto musí byť model vybavený algoritmom na identifikáciu a adaptáciu na zmenu R2. Presnosť modelu možno zvýšiť využitím snímača teploty umiestneným na motore.
Pri pohonoch s vysokými nárokmi na dynamiku je dôležitou vlastnosťou dynamika momentu motora, ktorá závisí od rýchlosti nárastu rotorového prúdu. Rýchlosť zmeny rotorového prúdu je limitovaná veľkosťou rozptylovej indukčnosti motora (pozri náhradnú schému AMK v minulom čísle, obr. 55, vetvu II), štruktúrou regulácie, polohou pracovného bodu pohonu a napäťovou rezervou meniča. Pri skokovej zmene napätia z nuly na menovitú hodnotu a frekvencii 50 Hz je rýchlosť nárastu prúdu na menovitú hodnotu 0,5 až 0,7 ms [2], pričom s rastúcimi otáčkami sa táto doba kvôli rastúcemu indukovanému napätiu predlžuje. Uvedená hodnota predstavuje prirodzený limit dynamiky nárastu prúdu v motore. V praxi je z realizačných dôvodov táto doba predĺžená na cca 5 ms. Aby sa dosiahla dobrá dynamika, je nutná napäťová rezerva meniča, obvykle 10 %. Bez nej by bola v okolí menovitých otáčok dynamika nárastu momentu len 50 ÷ 100 ms. Bežne sa dynamika momentovej slučky pohybuje okolo 10 ÷ 20 ms.
Vektorové riadenie sa používa v aplikáciách, ktoré vyžadujú kvalitnú reguláciu s vysokou dynamikou. Dosiahnutá kvalita regulácie je rovnaká alebo dokonca lepšia ako pri jednosmernom pohone. Riadenie sa nasadzuje pre sólo motory alebo skupinu motorov s pevnou mechanickou väzbou. Vzhľadom na to, že presnosť a dynamika riadenia sú porovnateľné s riadením JSCBM, aplikačné moduly pre nadradené riadenie (napr. na riadenie navíjačiek, letmých nožníc a pod.) sú rovnaké pre jednosmerný aj striedavý pohon.
Priame riadenie momentu
Priame riadenie momentu (angl. direct torque control – DTC) bolo navrhnuté v polovici 80. rokov minulého storočia, avšak priemyselná výroba pohonov tohto typu sa začala až o desať rokov neskôr. Metódu komerčne využíva firma ABB.
Princíp metódy sa zakladá na riadení polohy vektora magnetického toku statora tak, aby sa dosiahli žiadané hodnoty toku a momentu. Výpočet potrebného statorového toku a momentu sa robí na základe merania statorového napätia a prúdu a pomocou presného modelu stroja. Metóda poskytuje veľmi rýchlu časovú ozvu rádu milisekúnd, nižšie spínacie straty a straty od vyšších harmonických v porovnaní s klasickým vektorovým riadením využívajúcim PWM.
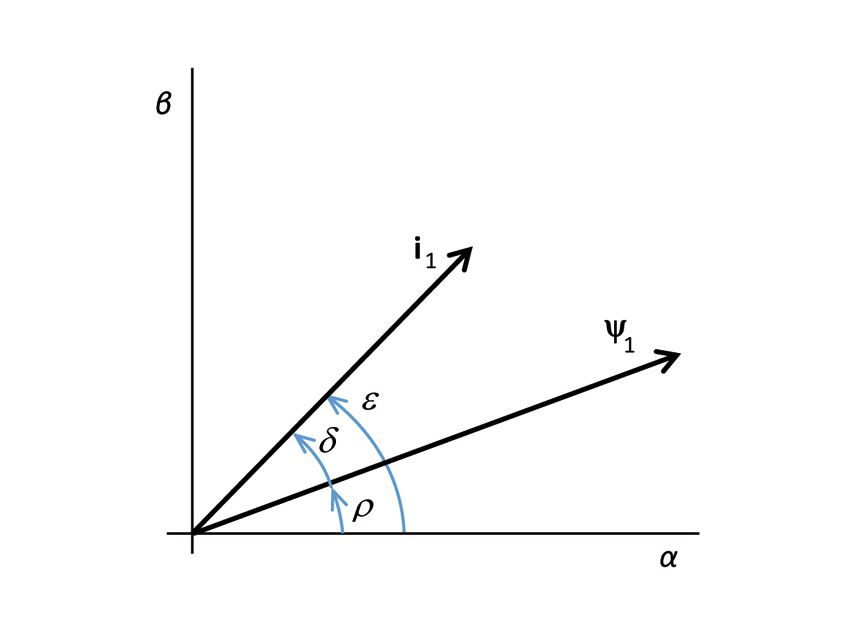
Pre trojfázový symetrický asynchrónny motor vo všeobecnosti platí, že okamžitá hodnota momentu je daná vektorovým súčinom priestorových vektorov statorového toku ψ1 a statorového prúdu i1 (obe veličiny sú v statorovej súradnicovej sústave, obr. 63):
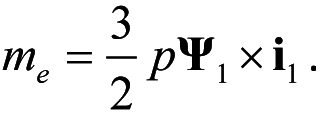 (37)
(37)
Priestorové vektory prúdu a statorového toku sú definované svojou veľkosťou a uhlom natočenia voči statorovej súradnicovej sústave (obr. 63). Prepisom rovnice (37) dostaneme:
 (38)
(38)
kde δ je uhol medzi priestorovými vektormi prúdu a statorového toku. Pokiaľ chceme meniť veľkosť momentu, dá sa podľa rovnice (38) meniť veľkosť veličín alebo ich vzájomná poloha. Zmena veľkosti magnetického toku statora je ovplyvnená časovou konštantou statorového vinutia, ktorá býva aj pri malých motoroch rádovo v stovkách milisekúnd. Preto sa pri regulácii udržiava tok stroja konštantný a mení sa jeho poloha. Zmena polohy vektora je rýchla, čo umožní aj rýchlu zmenu momentu.
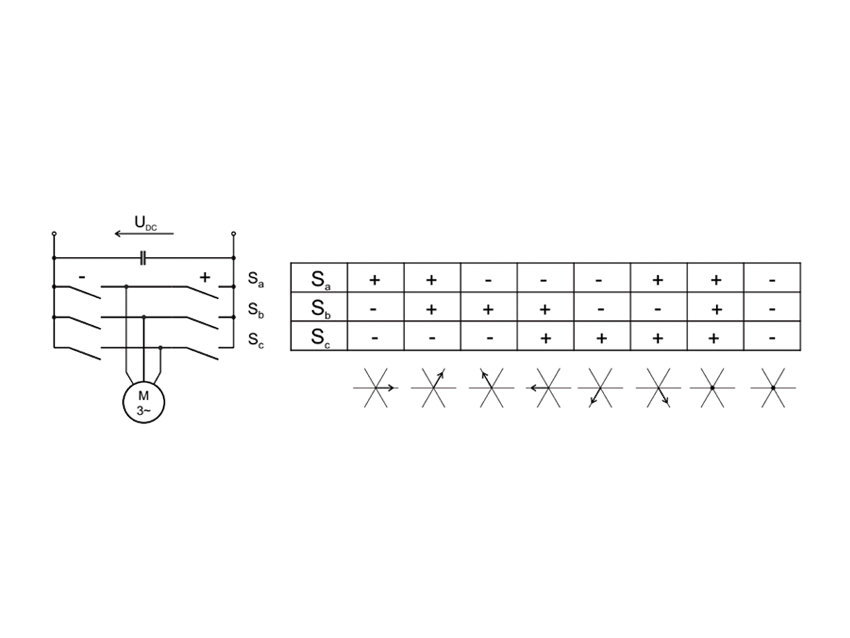
Pri priamom riadení momentu sa nevyužíva šírkovo impulzová modulácia (PWM). Napájacie napätie pre motor je generované iným spôsobom. Na obr. 64 vľavo je schematicky znázornený jednosmerný medziobvod a striedač frekvenčného meniča. Spínače vo vetvách Sa, Sb a Sc naznačené ako kontakty sú v skutočnosti tranzistory vo vetvách striedača. Znamienko + predstavuje zopnutý horný tranzistor vo vetve, znamienko – zopnutý dolný tranzistor. Tabuľka vpravo zobrazuje možné kombinácie zopnutia spínačov a tomu zodpovedajúcu polohu priestorového vektora napätia v motore. Možných kombinácií (stavov) spínačov je osem: šesť kombinácií definuje polohu nenulového vektora napätia, dve kombinácie predstavujú zopnuté buď všetky horné, alebo všetky dolné spínače IGBT, keď sa na motor nepripája žiadne napätie.
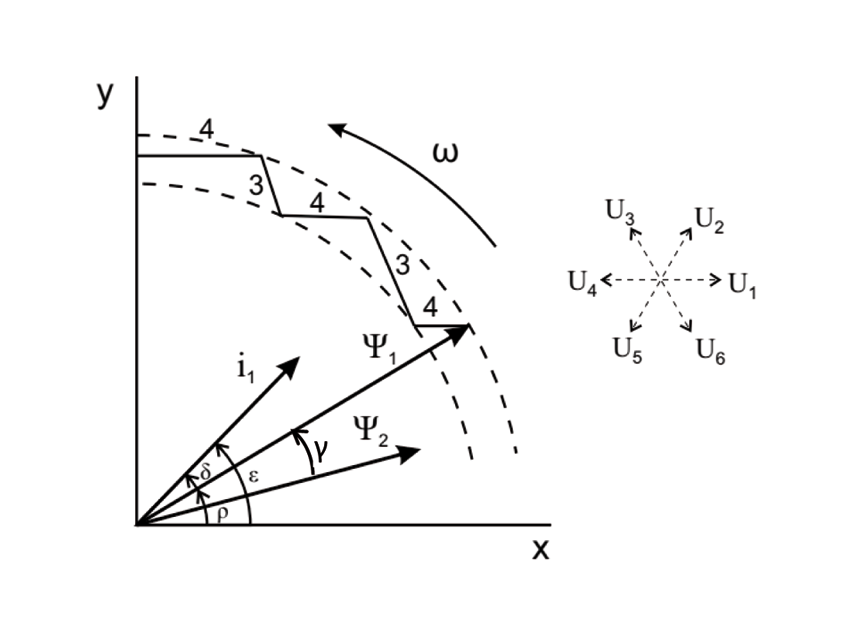
Statorový tok sa reguluje prostredníctvom hysterézneho regulátora (obr. 65). Šírkou hysterézneho pásma možno nastaviť, v akom rozsahu sa bude vektor magnetického toku meniť. Prerušované čiary zobrazujú pásmo, v ktorom sa magnetický tok udržiava. Ak je napr. vektor magnetického toku v polohe naznačenej na obr. 65 a požaduje sa smer otáčania podľa vyznačenej uhlovej rýchlosti ω, privedie sa na motor vektor napätia U4 a bude sa udržiavať dovtedy, kým tok nedosiahne dolnú hranicu hysterézneho pásma. Potom sa prepne na U3 a bude sa udržiavať dovtedy, kým vektor toku nenarazí na hranicu (teraz hornú). Takýmto spôsobom sa vektor magnetického toku udržiava v želanom pásme vrátane jeho rotácie. Ak nie je potrebná zmena polohy, resp. veľkosti vektora, zopne sa niektorá z kombinácií pre nulové napätie. V takom prípade sa veľkosť toku bude pomaly znižovať (doznievanie s časovou konštantou statora). Statorový tok sa priebežne počíta zo statorového prúdu a napätia podľa rovnice:
![]() (39)
(39)
pričom vyhodnocovanie sa robí v krátkych intervaloch, rádovo v desiatkach mikrosekúnd. To umožní presné udržiavanie statorového toku v želanom pásme.
Podobne ako riadenie statorového prúdu, aj regulácia momentu využíva hysterézny regulátor. Je definované pásmo, v ktorom sa moment motora udržiava. Úpravou rovnice (38) dostaneme moment motora vyjadrený pomocou statorového a rotorového toku:
 (40)
(40)
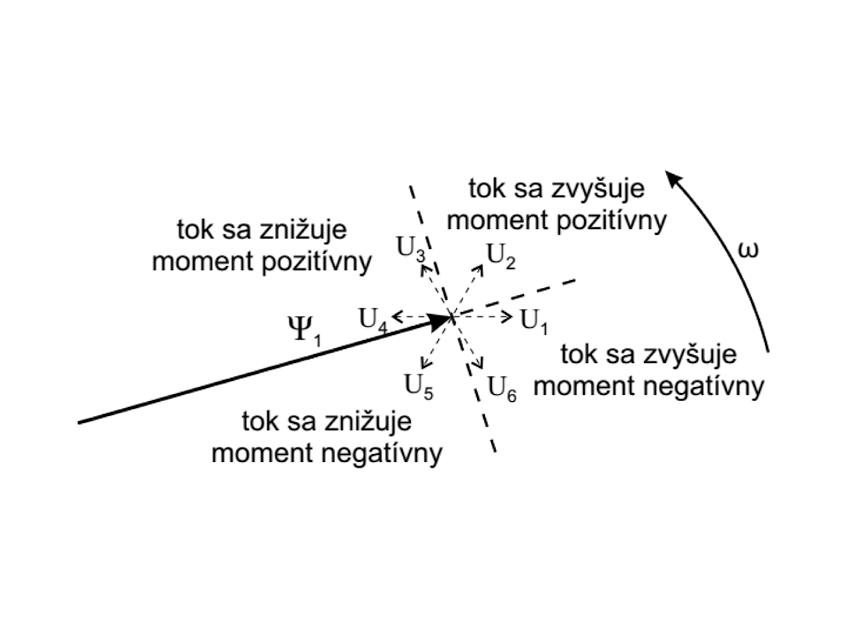
kde γ je uhol, ktorý zvierajú vektory statorového a rotorového toku. Výstupy z hysteréznych regulátorov statorového toku a momentu motora sa vedú do logiky, ktorá robí výber optimálneho vektora napätia. Na obr. 66 je znázornené, ktorý vektor napätia je potrebný na dosiahnutie želaného stavu podľa želaného toku a momentu motora. Výberom vektora napätia sa rieši naraz dosiahnutie želanej veľkosti a polohy statorového toku aj momentu motora.
Ako vidno z rovnice (40), moment motora sa dá meniť zmenou uhla γ. Aj v tomto prípade sa kvôli veľkým časovým konštantám statorového i rotorového vinutia dáva prednosť zmene vzájomnej polohy vektorov pred zmenou ich veľkosti. Pri posunutí vektora statorového toku v smere rotácie sa zväčší uhol γ medzi vektormi tokov a moment stúpa. Pri opačnom posunutí moment klesá a pri zaostávaní za vektorom rotorového toku je moment motora záporný, t. j. dochádza k brzdeniu. Kým pre zmenu veľkosti magnetického toku je typická časová konštanta rádovo v stovkách ms, zmena fázy sa dosiahne za niekoľko ms, čím je zdôvodnená dobrá dynamika tohto typu riadenia.
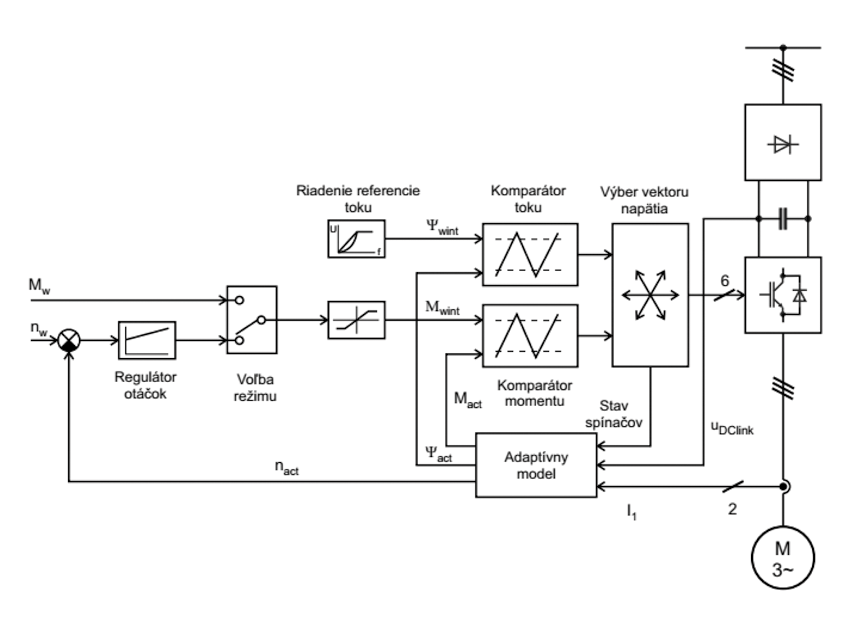
Štrukturálna schéma priameho riadenia momentu podľa [3] je na obr. 67. Riadenie je v statorovej súradnicovej sústave α, β, takže odpadá nutnosť transformácie veličín do/z točivej sústavy. Meria sa napätie a prúd statora, ktoré sa transformujú do dvojfázovej statorovej sústavy α, β. Pomocou nich sa v adaptívnom modeli vypočítajú zložky magnetického toku statora a hodnota momentu. Skutočný magnetický tok statora sa v hysteréznom regulátore porovnáva s internou želanou hodnotou toku Ψwint. Výstup z regulátora sa vedie do logického obvodu, ktorý ovláda spínače striedača (tranzistory). Okamžitý moment motora je vypočítaný zo statorového toku a prúdu a v komparačnom regulátore sa porovnáva s interným želaným momentom Mwint. Mwint je generovaný regulátorom otáčok a obmedzovačom momentu alebo je priamo zadaný ako želaná hodnota momentu Mw. Výstup z komparačného regulátora je vedený do logického člena, ktorý potom vyberá optimálny napäťový vektor.
Riadenie využíva adaptívny model motora. Parametre motora, ako sú statorový odpor a hlavná a rozptylová indukčnosť, sa zadávajú pri oživovaní pohonu a stačia na výpočet približného modelu motora. Presné doladenie parametrov sa robí identifikáciou na bežiacom motore. Statorové prúdy sú merané v dvoch fázach, statorové napätie je odvodené od napätia jednosmerného medziobvodu (DC link) a stavu spínačov (tranzistorov) v striedači. Pokiaľ stačí presnosť riadenia otáčok v ustálenom stave 0,5 %, čo stačí pre väčšinu priemyselných aplikácií, nie je nutné vybaviť pohon snímačom otáčok. Ozva momentu je na úrovni 2 ÷ 5 ms.
Signály skutočného momentu a statorového toku sa vypočítavajú každých 25 µs a sú vedené do komparátorov. Výstupy z komparátorov sú vedené do odvodu označeného výber vektora napätia, ktorý vyberá optimálnu kombináciu zopnutia spínačov striedača. Obvod výber vektora napätia je signálový procesor pracujúci s frekvenciou 40 MHz doplnený o hardvér ASIC. Signály do meniča sú z neho kvôli zvýšeniu prenosovej rýchlosti vedené po optickom vlákne.
Výhodou DTC je, že sa minimalizuje počet zopnutí tranzistorov v striedači. Tranzistory sa spínajú len vtedy, keď je to potrebné. Na rozdiel od meničov s PWM vykazuje DTC o cca 30 % menej zopnutí. To prináša menšie spínacie straty na tranzistoroch a menšie tepelné zaťaženie motora vyššími harmonickými.
Menič je vybavený aj regulátorom otáčok. Spätná väzba otáčok môže byť z modelu motora (bezsnímačové riadenie) alebo pri vyšších požiadavkách na presnosť riadenia z externého snímača otáčok. Riadenie umožňuje aj dynamickú kompenzáciu momentu. V prípade, že sa využíva bezsnímačové riadenie, mechanická rýchlosť sa počíta zo zmeny polohy vektora rotorového toku. Riadenie umožňuje optimalizáciu magnetického toku stroja, t. j. jeho zníženie pri malom záťažovom momente, a brzdenie pomocou toku stroja.
Literatúra
[1] Blaschke, F.: Das Prinzip der Feldorientierung die Grundlage für die Transvektor Regelung von Asynchronmaschinen. Siemens Zeitschrift 1971, 757.
[2] Klautchek, H.: Vektorregelung für Asynchronmaschinen. Konferencia Elektrické pohony, Plzeň, 1993.
[3] Direct Torque Control. Technical Guide No.1. ABB, 2002.
Peter Girovský
František Ďurovský
Želmíra Ferková
Ján Kaňuch
Marek Pástor
Technická univerzita v Košiciach
Fakulta elektrotechniky a informatiky
Katedra elektrotechniky a mechatroniky
peter.girovsky@tuke.sk







